Env
# install IDE Anaconda Venv
conda env list
conda create --name <venv_name> python==<version>
conda activate <venv_name>
conda list
conda deactivate
# install Nvidia GetForce Driver
nvidia-smi
# install by pip or conda, attention to version alignment
# torch from https://pytorch.org/ based on CUDA_VERSION
# Sci-computer Lib, such as torchsummary, pandas,matplotlib, scikit-learn...
# transformers datasets accelerate
# bak
conda create --name <venv_name>_bak --clone <venv_name>
conda env remove --name <venv_name>_bak
# proxy
vim ~/.bashrc
PROXY_SERVER="http://your_proxy_server_ip:port"
export http_proxy="$PROXY_SERVER"
export HTTP_PROXY="$http_proxy"
export https_proxy="$PROXY_SERVER"
export HTTPS_PROXY="$https_proxy"
# export all_proxy="socks5://your_proxy_server_ip:port"
# export ALL_PROXY="$all_proxy"
# export no_proxy="localhost,127.0.0.1,::1,.local"
# export NO_PROXY="$no_proxy"
export HF_ENDPOINT=https://hf-mirror.com
export HF_XET_CACHE=https://hf-mirror.com/xet
source ~/.bashrc
# verify
# export HUGGINGFACE_TOKEN=<token>
hf auth login
hf auth whoami
Tensor
一种专用于神经网络GPU计算的多维数组结构
各种创建操作
torch.[create_function]([**args]):[**args]作用下,以[create_function]方式创建tensor,包括list、arr、numpy、share_memory data、zeros、ones、full、eye、empty、rand、randn、andint、normal、arange、linspace、logspace、zeros_like、ones_like、rand_like等等,注意数据是值传递还是地址传递各种数学运算
[math_function]([**args]):tensor与[**args]进行``[math_function]`的运算,包括sqrt、log、exp、abs、neg、reciprocal、sigmoid、tanh、relu、mask、cat、stack、chunk、expand、einsum等等基本属性
data:tensor不需要梯度计算的复制品dtype:tensor的数据类型device:tensor的存储设备,默认cpushape/size():tensor的维度大小ndim/dim():tensor的维度数量numel():tensor中元素的总数量
梯度相关
requires_grad:tensor是否需要计算梯度,默认False,通过目标函数最终的标量结果backward(retain_graph=true)累加批次所有梯度,默认计算图自动销毁,无法重复求梯度;最后再通过优化器step()更新tensor的datagrad:tensor的梯度信息,初始为None,其下zero_()进行梯度清空grad_fn:创建该tensor的函数,用于反向传播is_leaf:tensor是否为叶子节点,用于反向传播
内存布局
stride():tensor各维度在内存中的步长is_contiguous():tensor在内存中是否连续存储storage():tensor的底层存储对象storage_offset():tensor数据在存储中的偏移量
数据类型转换
to([type]):将tensor数据转换为指定类型int(),long(),float(),double(),bool():快捷类型转换方法
设备转换
cuda():转移到GPU设备cpu():转移到CPU设备to([device]):转移到指定设备
形状转换
reshape([shape]):重新调整tensor形状,等价于contiguous + viewview([shape]):创建新的tensor视图permute([dims]):重新排列维度transpose([dim0], [dim1]):交换两个维度squeeze():移除大小为1的维度unsqueeze([dim]):在指定位置增加维度flatten([start_dim], [end_dim]):展平tensor
数据转换
numpy():转换为NumPy数组(需在CPU)tolist():转换为Python列表item():提取标量值detach():分离计算图,返回不需要梯度的tensorclone():创建tensor的深拷贝contiguous():返回内存连续的tensor
广播机制:从右向左(低维到高维)对齐维度,通过自动补1扩展维度,并最终将大小为1的维度复制扩展,以使两个张量具有运算兼容的形状
nn.Parameter([tensor]):张量参数化,存于model.parameters(),框架要求其中的tensors都具有梯度更新,才可再由优化器统一更新
NN
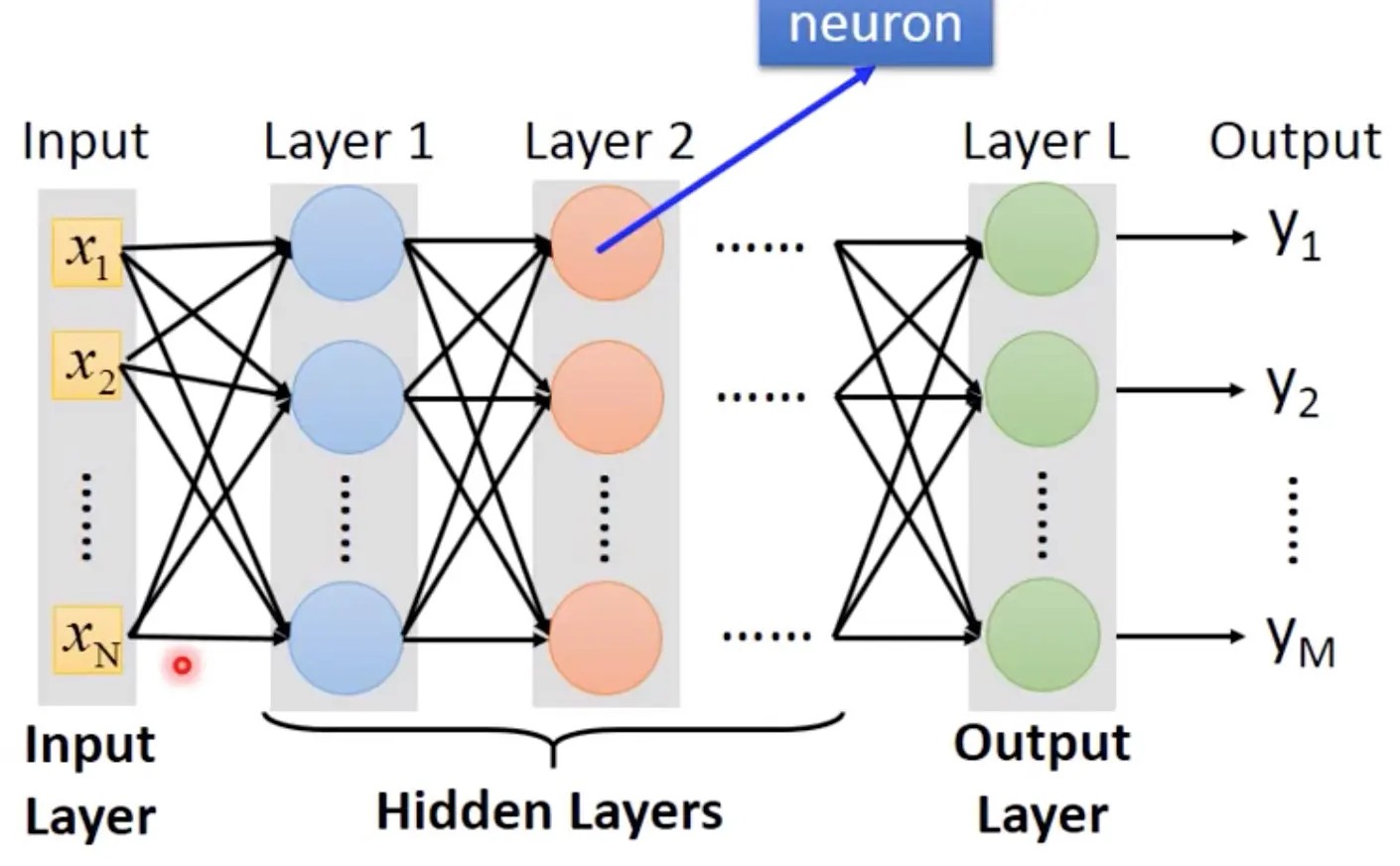
$$ \textbf{y} = model(\textbf{x}) \quad model = h_L \circ h_{L-1} \circ \cdots \circ h_1 $$- 神经元(Neuron):计算基本单元,形式化表示为 $h_{\textbf{w,b}}(\textbf{x})=f(\textbf{w}^T \textbf{x} + \textbf{b})$ ,堆叠学习输入数据的层次化特征表示
- 权重($\textbf{w}^T$):控制每个输入特征对神经元输出的影响程度
- 偏置($\textbf{b}$):调节激活函数的触发阈值
- 激活函数($f$):影响反向传播的梯度流动,控制神经元的激活与抑制
- 层(Layers):经过神经元组合结构后产生的数据,一般神经网络结构依次为输入层(Input Layer)负责接收原始数据 $\rightarrow$ 隐藏层(Hidden Layers)进行特征提取 $\rightarrow$ 输出层(Output Layer)根据目标归纳为最终预测
- 模型(Model):任务的规律函数
网络训练过程:首先输入数据通过模型前向传播(Forward Propagation)得到预测输出;随后利用损失函数(Loss Function)计算预测值与真实值之间的误差,并通过链式法则(Chain Rule)推导出各参数关于损失函数的梯度;接着模型反向传播(Back Propagation),基于梯度下降法,利用合适的优化器(Optimizer),在一定学习率(Learning Rate)下更新参数$\Delta \textbf{w}$和$\Delta \textbf{b}$,从而优化模型;通过多次迭代,模型逐步调优权重和偏置,最终使前向传播后损失函数计算的误差达到较小,获得性能较优的模型用于实践。
Activation Function
为避免多层神经网络退化为单层结构,同时帮助深度网络能够有效处理高维复杂任务,需要在每个神经元后引入非线性激活函数:
| 函数名 | 表达式 | 图像 | 区间 | 单调性 | 对称性 | 可微性 | 导数 |
|---|---|---|---|---|---|---|---|
| Sigmoid | $\sigma(x) = \frac{1}{1 + e^{-x}}$ $\sigma'(x) = \sigma(x) \cdot (1 - \sigma(x))$ | 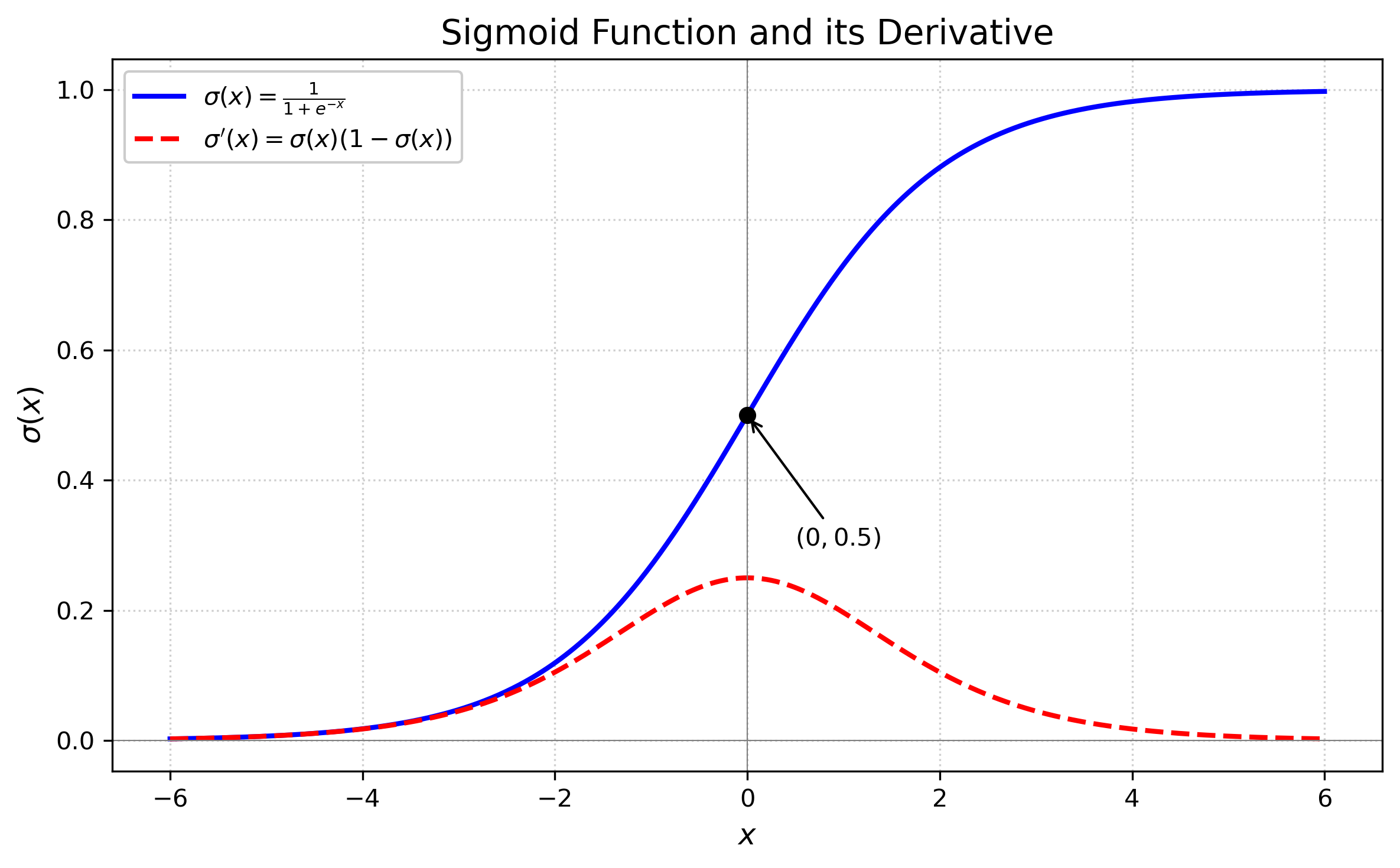 | (0,1),适合将实数映射到概率 | 单调递增 | 关于原点不对称 | 光滑(连续可导) | 计算高效,但当输入值很大或很小时,梯度消失,训练耗时 |
| Tanh | $\tanh(x) = \frac{e^{x} - e^{-x}}{e^{x} + e^{-x}}$ $\tanh'(x) = 1 - \tanh^2(x)$ | 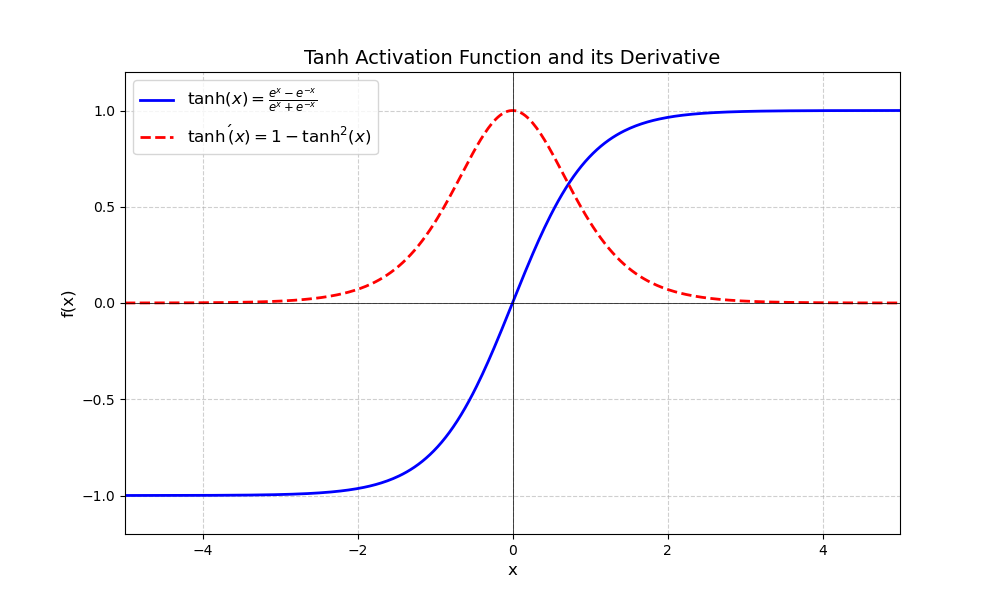 | (-1,1),适合于数据归一化 | 单调递增 | 关于原点对称,具有正负一致性 | 光滑(连续可导) | 计算高效,值大方便模型收敛,但当输入值很大或很小时,梯度消失,训练耗时 |
| ReLU | $\text{ReLU}(x) = \begin{cases} x & \text{if } x > 0 \\ 0 & \text{if } x \leq 0 \end{cases}$ $\text{ReLU}'(x) = \begin{cases} 1 & \text{if } x > 0 \\ 0 & \text{if } x \leq 0 \end{cases}$ | 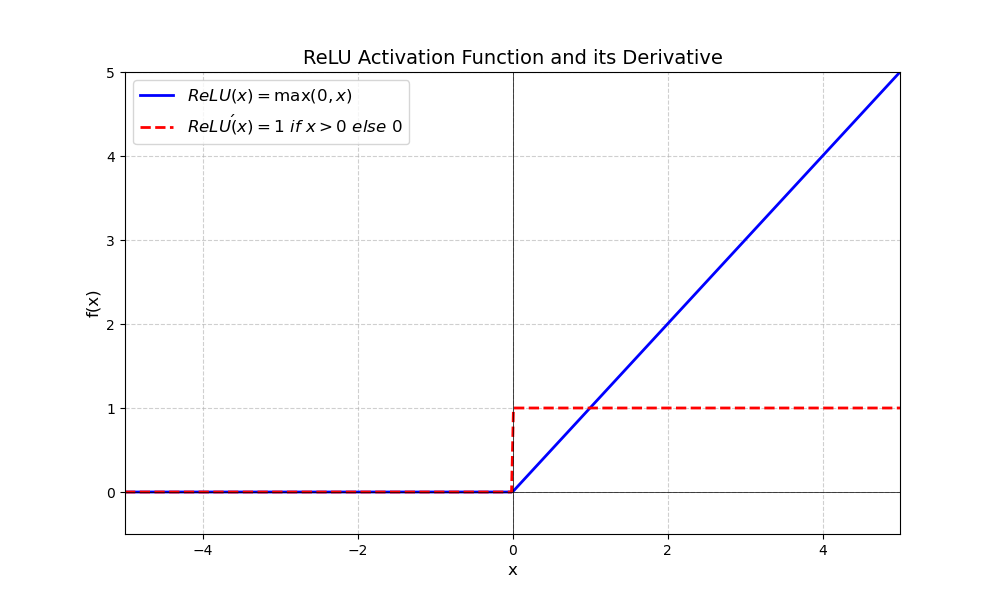 | (0, +∞),适合于加速网络训练 | 单调不递减 | 关于原点不对称 | 分段,连续可导 | 计算高效,值大方便模型收敛,但可能存在神经元死亡 |
| Leaky ReLU | $f(x) = \begin{cases} x & \text{if } x \geq 0 \\ \alpha x & \text{if } x < 0 \end{cases}$ $f'(x) = \begin{cases} 1 & \text{if } x \geq 0 \\ \alpha & \text{if } x < 0 \end{cases}$ | 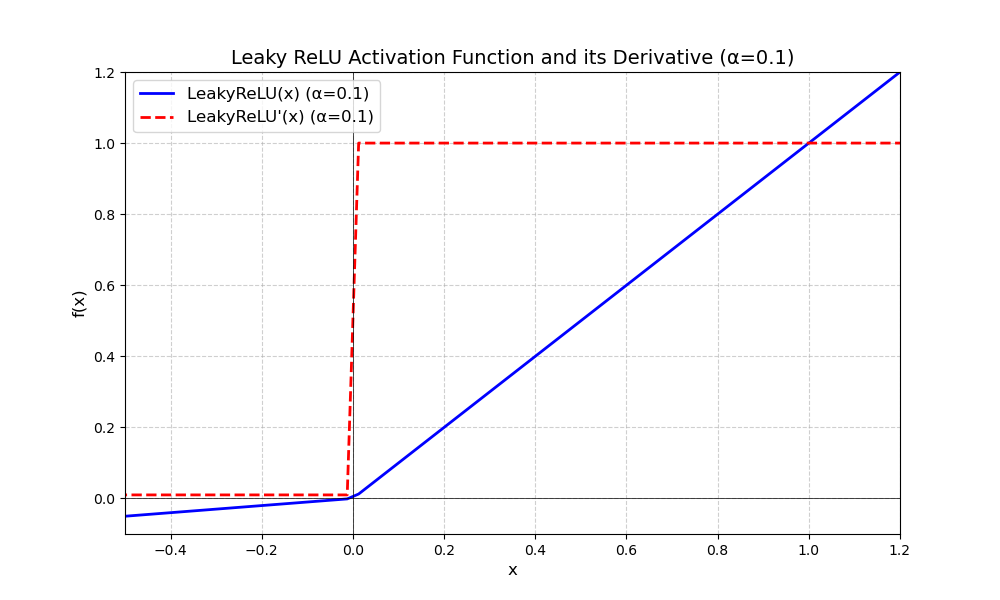 | (-∞, +∞),适合于解决梯度消失 | 单调递增 | 关于原点不对称 | 分段,连续可导 | 计算高效,值大方便模型收敛,但超参不好确定 |
Loss Function
衡量预测值与真实值的差异,Pytorch中作为层可自定义:
| 函数名 | 表达式 | 解释 | 优点 | 缺点 |
|---|---|---|---|---|
| Mean Squared Error | $J(x) = \frac{1}{2n} \sum_{i=1}^{n} (y_i - \hat{y}_i)^2$ | 考虑事件独立,计算实际模型与理想模型的差距 | 梯度稳定,训练高效;适合大规模严格回归任务; | 平方项使得模型对离群点敏感,鲁棒性较差; |
| Cross Entropy | $H(\hat{y}_i,y_i) = - \frac{1}{n} \sum_{i=1}^{n} y_i \log \hat{y}_i$ | 考虑事件独立,最大似然估计实际模型作为理想模型的概率 | 与softmax结合,适合大规模严格分类任务;包括softmax单标签|sigmoid多标签分类 | 要求分类类别互斥;梯度不稳定,需谨慎处理低置信度的错误样本; |
Optimizer
通过损失函数应用链式法则对所有参数计算偏导数(即梯度),随后以预设的学习率$\alpha$沿梯度下降方向更新参数,使得下次迭代时损失函数计算的误差降低:
$$ \textbf{w}_{new} = \textbf{w}_{old} - \alpha \frac{\partial J(w)}{\partial w} \quad \textbf{b}_{new} = \textbf{b}_{old} - \alpha \frac{\partial J(b)}{\partial b} $$优化过程常见的问题包括:
- $\alpha$过小时模型收敛过慢,$\alpha$过大时模型收敛振荡
- 鞍点梯度停滞问题
- 局部极小值问题
| 优化器 | 特点 | 优点 | 适用情况 |
|---|---|---|---|
| MBGD | 以小批次(batch)数据的平均梯度更新 | 防止振荡 | 不独立使用 |
| Momentum | 当前梯度动量 = 动量系数 X 历史累计梯度动量 + (1 - 动量系数) X 当前小批次梯度 | 跳出局部最优 | 图像分类任务,卷积神经网络 |
| Adagrad | 当前学习率 = 标准学习率 / 历史累计梯度平方均值 | 学习率关于差值自适应 | 稀疏数据任务、NLP 早期模型 |
| RMSprop | 当前学习率 = 标准学习率 / 根号下,(自适应系数 X 历史累计梯度平方和 + (1 - 自适应系数) X 当前小批次梯度平方) | 可调自适应 | 时序数据处理任务,循环神经网络 |
| Adam | 融合Momentum动量和RMSprop学习率方法,并使用 $\frac{1}{1-参数^t}$纠正累计梯度动量和累计梯度平方和 | 纠正 | 几乎所有深度学习任务 |
| AdamW | 在Adam基础上,当前梯度 = Adam梯度 - 衰减系数 X 当前小批次梯度 | 权重衰减 | BERT、GPT 等 Transformer 模型 |
FCNN/MLP
 $$
L_i(n_i) -> L_j(n_j): \quad
\begin{align*}
\mathbf{W}_{ij} | \mathbf{b}_j =
\begin{bmatrix}
w_{11} & w_{12} & \cdots & w_{1n_i} \\
w_{21} & w_{22} & \cdots & w_{2n_i} \\
\vdots & \vdots & \ddots & \vdots \\
w_{n_j1} & w_{n_j2} & \cdots & w_{n_j n_i}
\end{bmatrix}
\begin{bmatrix}
b_1 \\
b_2 \\
\vdots \\
b_{n_j}
\end{bmatrix}
\end{align*}
$$
$$
L_i(n_i) -> L_j(n_j): \quad
\begin{align*}
\mathbf{W}_{ij} | \mathbf{b}_j =
\begin{bmatrix}
w_{11} & w_{12} & \cdots & w_{1n_i} \\
w_{21} & w_{22} & \cdots & w_{2n_i} \\
\vdots & \vdots & \ddots & \vdots \\
w_{n_j1} & w_{n_j2} & \cdots & w_{n_j n_i}
\end{bmatrix}
\begin{bmatrix}
b_1 \\
b_2 \\
\vdots \\
b_{n_j}
\end{bmatrix}
\end{align*}
$$- 全连接(Full Connect):相邻层所有神经元之间均相互连接,同一层神经元之间无连接
优点:易于实现,可拟合任意连续函数;擅长学习输入数据的全局模式;
缺点:参数量大,计算成本高;局部模式(如图像空间)捕捉能力弱,需手动设计特征;
CNN
simpleCNN
 $$
OH = \frac{H + 2P - FH}{S} + 1 \quad
OW = \frac{W + 2P - FW}{S} + 1
$$
$$
OH = \frac{H + 2P - FH}{S} + 1 \quad
OW = \frac{W + 2P - FW}{S} + 1
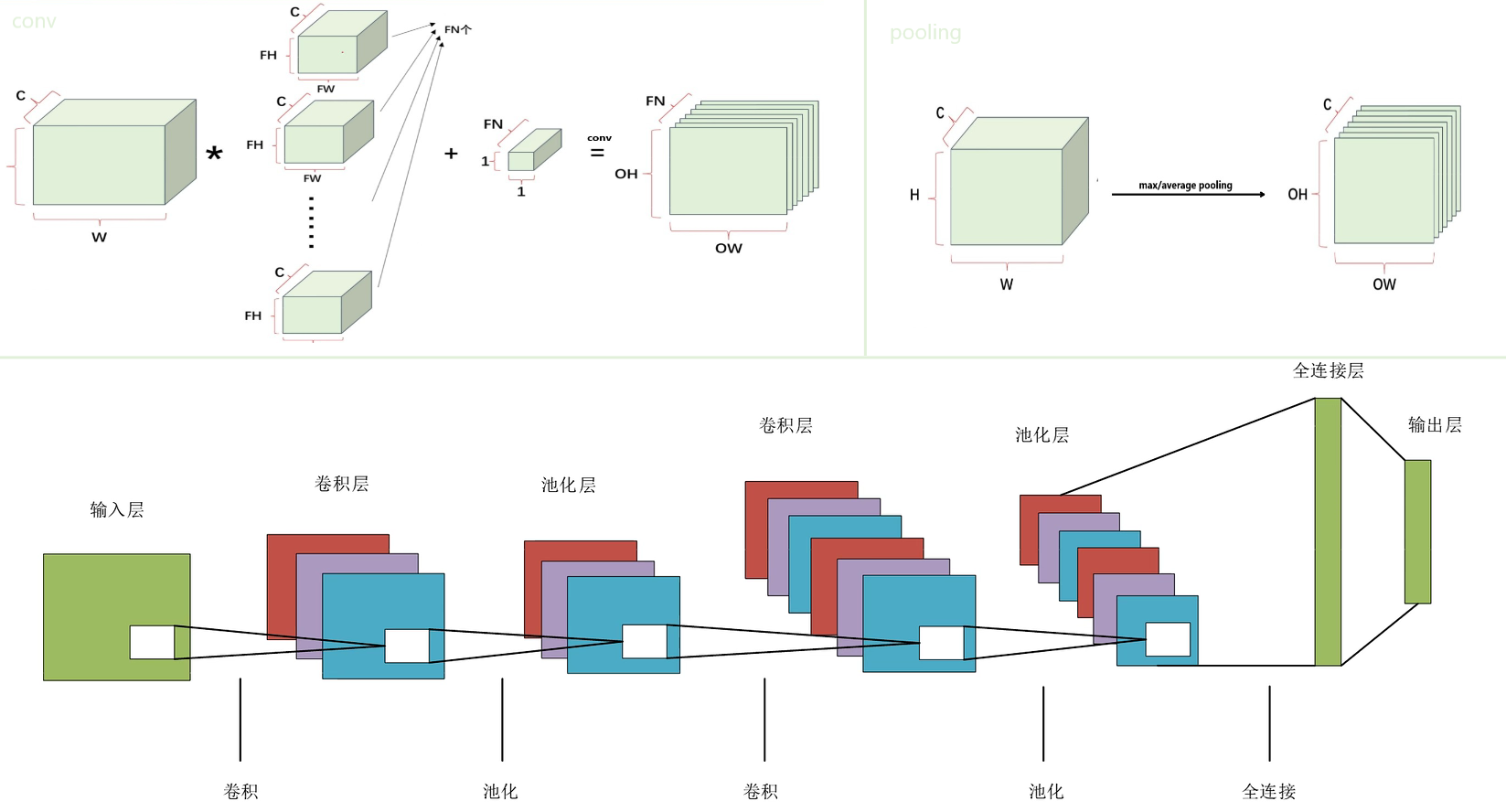
$$- 特征提取(Feature Extraction):
- 卷积(Convolutions):考虑步幅、填充,提取原数据中与卷积核特征相同的区域,产生通道数和特征图大小的变化
- 池化(Pooling)/ 下采样(Subsampling):考虑步幅、填充,按感受野数据降维,减弱对输入小幅平移的敏感程度,产生特征图大小的变化
- 参数共享(Param Share):同一卷积核在输入不同位置滑动并复用参数,计算效率高
优点:适合处理网格状数据;
缺点:输入矩阵大小固定;需要大量标注数据;解释性较弱;
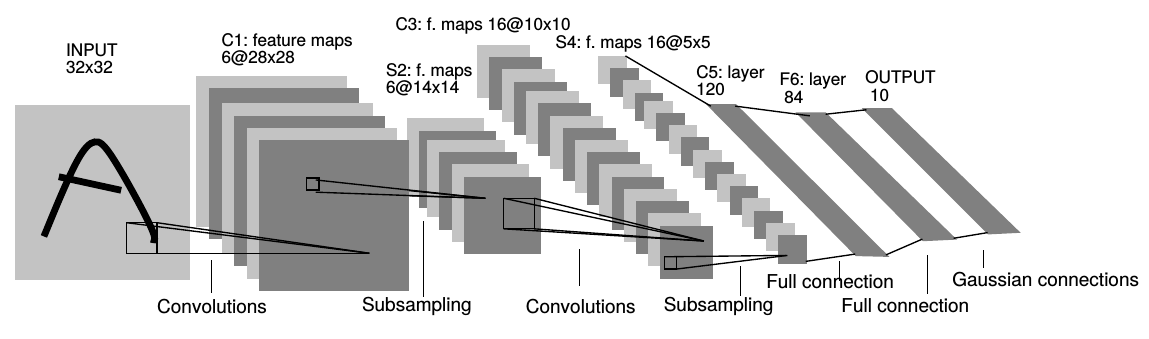
LeNet-5
| 层类型(5) | 参数设置 | 输出尺寸 |
|---|---|---|
| Input | 32×32×1(原始 MNIST 输入大小) | 32×32 灰度图像 |
| Conv1(Sigmoid/Tanh) | 6 个 5×5 卷积核,步长 1,填充 0 | 28×28×6 |
| Subsampling1(Average) | 2×2 平均池化,步长 2,填充 0 | 14×14×6 |
| Conv2(Sigmoid/Tanh) | 16 个 5×5 卷积核,步长 1,填充 0 | 10×10×16 |
| Subsampling2(Average) | 2×2 平均池化,步长 2,填充 0 | 5×5×16 |
| FC3(ReLU、Flatten) | 120 个神经元 | 120×1 |
| FC4(ReLU) | 84 个神经元 | 84×1 |
| Output(Softmax) | 10 个神经元 | 10×1(对应 0-9 数字分类) |
- 经典层级结构:N *(卷积 + 池化)+ 全连接
- 平均池化(Max Pooling):数据降维的同时,尽可能还原数据特征
优点:大幅减少参数量,计算效率高;
缺点:网络层数浅,只适合小数据集;平均池化会模糊特征;sigmoid激活容易导致梯度消失,训练不稳定;全连接层占大部分参数,易过拟合;
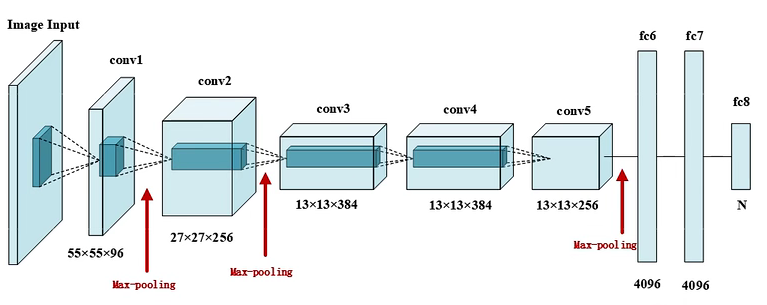
AlexNet
| 层类型(8) | 参数设置 | 输出尺寸 |
|---|---|---|
| Input | 224×224×3(ImageNet输入大小) | 227×227×3 RGB图像(双GPU并行) |
| Conv1(ReLU) | 96 个 11×11×3 卷积核,步长 4,填充 0 | 55×55×96 |
| Pooling1(Max) | 3×3 池化,步长 2,填充 0 | 27×27×96 |
| Conv2(ReLU) | 256 个 5×5×96 卷积核,步长 1,填充 2 | 27×27×256 |
| Pooling2(Max) | 3×3 池化,步长 2,填充 0 | 13×13×256 |
| Conv3(ReLU) | 384 个 3×3×256 卷积核,步长 1,填充 1 | 13×13×384 |
| Conv4(ReLU) | 384 个 3×3×384 卷积核,步长 1,填充 1 | 13×13×384 |
| Conv5(ReLU) | 256 个 3×3×384 卷积核,步长 1,填充 1 | 13×13×256 |
| Pooling5(Max) | 3×3 池化,步长 2,填充 0 | 6×6×256 |
| FC6(ReLU、Flatten、Dropout) | 4096 个神经元 | 4096 |
| FC7(ReLU、Dropout) | 4096 个神经元 | 4096 |
| FC8(Softmax) | 1000 个神经元 | 1000(对应 ImageNet 1000 类分类) |
数据增强(Data Augmentation):通过翻转、裁剪、PCA等操作,提高数据量,同时防止过拟合
随机失活(Dropout):一种正则化方法,每轮迭代时,随机去除层间部分神经元的连接,关闭前向传播和反向传播,防止过拟合
局部响应归一化(LRN):按通道对每个位置进行归一化,增强局部对比度,但其实作用不大
$$ b_{x,y}^i = \frac{a_{x,y}^i}{\left( k + \alpha \sum_{j=\max(0, i-n/2)}^{\min(N-1, i+n/2)} (a_{x,y}^j)^2 \right)^\beta} $$ReLU激活:梯度稳定,收敛加快
最大池化(Max Pooling): 保留显著特征
优点:网络层数更深,适合更大数据集;
缺点: 参数量大,计算成本高;大卷积核效率低;
VGG-16
| 层类型(16) | 参数配置 | 输出尺寸 |
|---|---|---|
| Input | 224×224×3(ImageNet输入大小) | 224×224×3 RGB图像 |
| Conv1_1(ReLU) | 64 个 3×3 卷积核,步长 1,填充 1 | 224×224×64 |
| Conv1_2(ReLU) | 64 个 3×3 卷积核,步长 1,填充 1 | 224×224×64 |
| Pooling1(Max) | 2×2 池化,步长 2,填充 0 | 112×112×64 |
| Conv2_1(ReLU) | 128 个 3×3 卷积核,步长 1,填充 1 | 112×112×128 |
| Conv2_2(ReLU) | 128 个 3×3 卷积核,步长 1,填充 1 | 112×112×128 |
| Pooling2(Max) | 2×2 池化,步长 2,填充 0 | 56×56×128 |
| Conv3_1(ReLU) | 256 个 3×3 卷积核,步长 1,填充 1 | 56×56×256 |
| Conv3_2(ReLU) | 256 个 3×3 卷积核,步长 1,填充 1 | 56×56×256 |
| Conv3_3(ReLU) | 256 个 3×3 卷积核,步长 1,填充 1 | 56×56×256 |
| Pooling3(Max) | 2×2 池化,步长 2,填充 0 | 28×28×256 |
| Conv4_1(ReLU) | 512 个 3×3 卷积核,步长 1,填充 1 | 28×28×512 |
| Conv4_2(ReLU) | 512 个 3×3 卷积核,步长 1,填充 1 | 28×28×512 |
| Conv4_3(ReLU) | 512 个 3×3 卷积核,步长 1,填充 1 | 28×28×512 |
| Pooling4(Max) | 2×2 池化,步长 2,填充 0 | 14×14×512 |
| Conv5_1(ReLU) | 512 个 3×3 卷积核,步长 1,填充 1 | 14×14×512 |
| Conv5_2(ReLU) | 512 个 3×3 卷积核,步长 1,填充 1 | 14×14×512 |
| Conv5_3(ReLU) | 512 个 3×3 卷积核,步长 1,填充 1 | 14×14×512 |
| Pooling5(Max) | 2×2 池化,步长 2,填充 0 | 7×7×512 |
| FC6(ReLU、Flatten、Dropout) | 4096 个神经元 | 4096 |
| FC7(ReLU、Dropout) | 4096 个神经元 | 4096 |
| FC8(Softmax) | 1000 个神经元 | 1000(对应 ImageNet 1000 类分类) |
- 块状(Block)简洁结构:带填充卷积保持分辨率,最大池化减半,可移植性强
- 小卷积核:参数少,训练效果和大卷积核差不多
优点:参数多,理解力强;
缺点:参数多,算力要求高;网络深,易梯度消失或梯度爆炸,依赖权重初始化;
GoogLeNet
| 层类型(22) | 参数配置 | 输出尺寸 |
|---|---|---|
| Input | 224×224×3(ImageNet输入大小) | 224×224×3 RGB图像 |
| Conv1(ReLU) | 64 个7×7 卷积核,步长 2,填充 3 | 112×112×64 |
| Pooling1(Max) | 3×3 池化,步长 2,填充 1 | 56×56×64 |
| Conv2(ReLU) | 64 个1×1 卷积核,步长 1,填充 0 | 56×56×64 |
| Conv3(ReLU) | 192 个3×3 卷积核,步长 1,填充 1 | 56×56×192 |
| Pooling3(Max) | 3×3 池化,步长 2,填充 0 | 28×28×192 |
| Inception 4a~4b | 2 个 Inception 模块 | 28×28×480 |
| Pooling4(Max) | 3×3 池化,步长 2,填充 0 | 14×14×480 |
| Inception 5a~5e | 5 个 Inception 模块 | 14×14×832 |
| Pooling5(Max) | 3×3 池化,步长 2,填充 0 | 7×7×832 |
| Inception 6a~6b | 2 个 Inception 模块 | 7×7×1024 |
| Pooling6(ALL Average) | 7×7 全局平均池化 | 1×1×1024 |
| FC(Flatten、Softmax、Dropout) | 1000 个神经元 | 1000(对应 ImageNet 1000 类分类) |
- Inception 模块:
- 多尺度特征融合:并行应用不同尺寸的卷积核和池化,要求不同路径输出保持高宽不变,在通道维度(超参)上连接,捕捉不同感受野的特征,特征提取能力强
- 1×1 卷积降维:实现上一层特征图跨通道的交互和信息整合,减少通道数,降低计算量
- 并行分支:“宽而浅”的设计,实现高精度低计算量
- 全局平均池化(GAP):输出只和通道数相关,替代全连接层,大幅减少参数量,抑制过拟合但易信息丢失
- 辅助分类器(auxiliary classifiers):在中间层添加辅助 Softmax 输出,增强梯度回传,缓解深层网络梯度消失问题,避免过拟合,效果有限
优点:计算高效,参数量少;
缺点:结构复杂,调试困难;对小数据集易过拟合;
ResNet-18
| 层类型(18) | 参数配置 | 输出尺寸 |
|---|---|---|
| Input | 224×224×3(ImageNet输入大小) | 224×224×3 RGB图像 |
| Conv1(ReLU、BN) | 64 个 7×7卷积核,步长2,填充 3 | 112×112×64 |
| Pooling1(Max) | 3×3最大池化,步长2,填充 1 | 56×56×64 |
| Stage1 | 2 个残差块(每个块含 2 个 3×3 卷积,直连跳跃连接) | 56×56×64 |
| Stage2 | 2 个残差块(每个块含 2 个 3×3 卷积,前一个下采样跳跃连接) | 28×28×128 |
| Stage3 | 2 个残差块(每个块含 2 个 3×3 卷积,前一个下采样跳跃连接) | 14×14×256 |
| Stage4 | 2 个残差块(每个块含 2 个 3×3 卷积,前一个下采样跳跃连接) | 7×7×512 |
| Pooling5(ALL Average) | 全局平均池化 | 1×1×512 |
| FC(Flatten、Softmax、Dropout) | 1000 个神经元 | 1000(对应 ImageNet 1000 类分类) |
残差(Stage):
- 跳跃连接(Skip Connection):提供直连或 1x1 卷积,要求不同路径输出各维度保持一致,缓解【深度网络-梯度消失/爆炸】无法保持恒等状态而模型退化的问题,允许网络选择性地学习残差$F(X) - x$,至少不会比浅层网络更差
- 批量标准层(Batch Normalize):$ \gamma, \beta$持续训练,对多批次特征图任一维度调整(统一量纲、移动数据分布区间到激活函数高梯度范围),加快模型收敛速度,使模型更稳定 $$ y_i = \gamma \cdot \left( \frac{x_i - \mu_B}{\sqrt{\sigma_B^2 + \epsilon}} \right) + \beta \\ \mu_B = \frac{1}{m}\sum_{i=1}^m x_i \quad \sigma_B^2 = \frac{1}{m}\sum_{i=1}^m (x_i - \mu_B)^2 \quad \epsilon > 0 \quad \gamma, \beta $$
优点:为深度学习打下基础;迁移学习,作为预训练模型效果好;
缺点:跳跃连接可能引入噪声;
DenseNet-121
| 层类型(121) | 参数配置 | 输出尺寸 |
|---|---|---|
| Input | 224×224×3(ImageNet输入大小) | 224×224×3 RGB图像 |
| Conv1(ReLU、BN) | 64 个 7×7卷积核,步长2,填充 3 | 112×112×64 |
| Pooling1(Max) | 3×3最大池化,步长2,填充 1 | 56×56×64 |
| Dense1 | 6 层密集块(growth rate =32) | 56×56×256 |
| Trans1 | 128 个 1×1 卷积核 → 2×2 平均池化 | 28×28×128 |
| Dense2 | 12 层密集块(growth rate =32) | 28×28×512 |
| Trans2 | 256个 1×1 卷积核 → 2×2 平均池化 | 14×14×256 |
| Dense3 | 24 层密集块(growth rate =32) | 14×14×1024 |
| Trans3 | 512个 1×1 卷积核 → 2×2 平均池化 | 7×7×512 |
| Dense4 | 16 层密集块(growth rate =32) | 7×7×1024 |
| Pooling5(ALL Average) | 全局平均池化 | 1×1×1024 |
| FC(Flatten、Softmax、Dropout) | 1000 个神经元 | 1000(对应 ImageNet 1000 类分类) |
密集连接(Dense Connection):每一单元的输入来自前面所有单元的输出,显著提升特征复用能力和计算效率
- 增长率(Growth Rate):特征提取单元输出特征图的通道数
- 瓶颈系数(Bottleneck Factor):特征提取单元中间层输出特征图的通道数,平衡计算效率和特征表达能力
过渡层(Transition Layer):控制模型复杂度,使用平均池化对局部区域取平均值,能保留整体特征的分布
优点:特征复用性强;参数高效;缓解梯度消失;正则化效果以防止过拟合;
缺点:计算复杂,内存消耗高;
RNN
simpleRNN
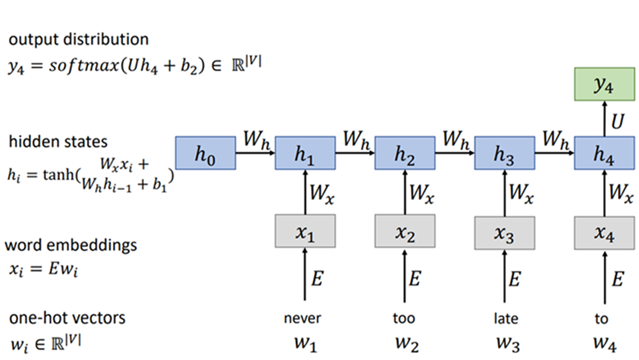
循环连接(时间步):允许序列信息在各个时间步之间传递,每个时间步的输出取决于当前时刻的输入和上一时刻的隐藏状态,这种隐藏状态包含了上文信息
参数共享(Param Share):泛化到不同长度的样本,提高计算效率,防止过拟合
隐藏连接(隐藏层)
优点:适合处理序列数据;
缺点:序列计算方式,训练较慢;时间步信息太长,容易产生梯度消失/爆炸;
LSTM
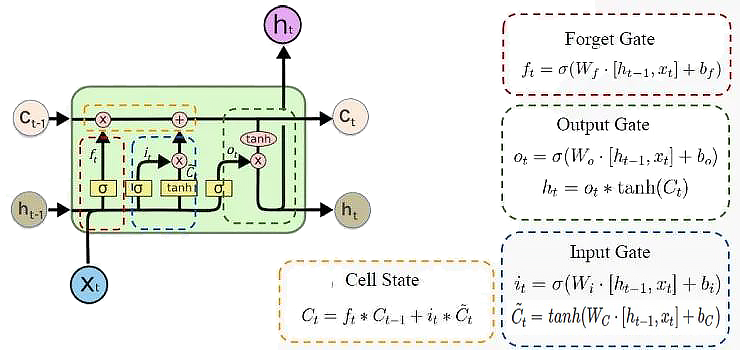
- ”记忆细胞“状态($C_{t-1} \rightarrow C_t$):保存历史时刻中的有效信息
- 权重门控结构:选择性记忆或遗忘信息
- 遗忘门(Forget Gate):淡化过去时间步信息
- 输入门(Input Gate):淡化当前时间步信息
- 输出门(Output Gate):激活当前及其之前时间步信息,同时解决梯度问题
优点:缓解梯度消失/爆炸;
缺点:无法捕捉长期依赖关系;并行化困难;计算复杂度高,内存消耗大,可能过拟合;
GRU
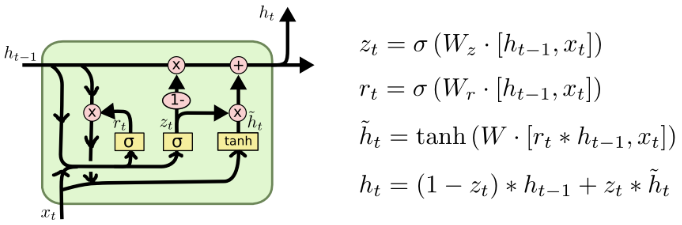
- 权重门控结构:选择性更新或重置信息
- 重置门$r_t$(Reset Gate):淡化过去时间步信息
- 更新门$z_t$(Update Gate):平衡过去和当前时间步信息的权重
优点:缓解梯度问题,降低结构复杂性,训练效率高;
缺点:无法捕捉长期依赖关系;并行化困难;
Transformer
史上最全Transformer:灵魂20问帮你彻底搞定Transformer-干货! - 知乎
CNN像素级全局感知能力(自注意力)、RNN序列建模特性(位置编码),适合seq2seq(context + prompt -> answer)问题,hard train一发
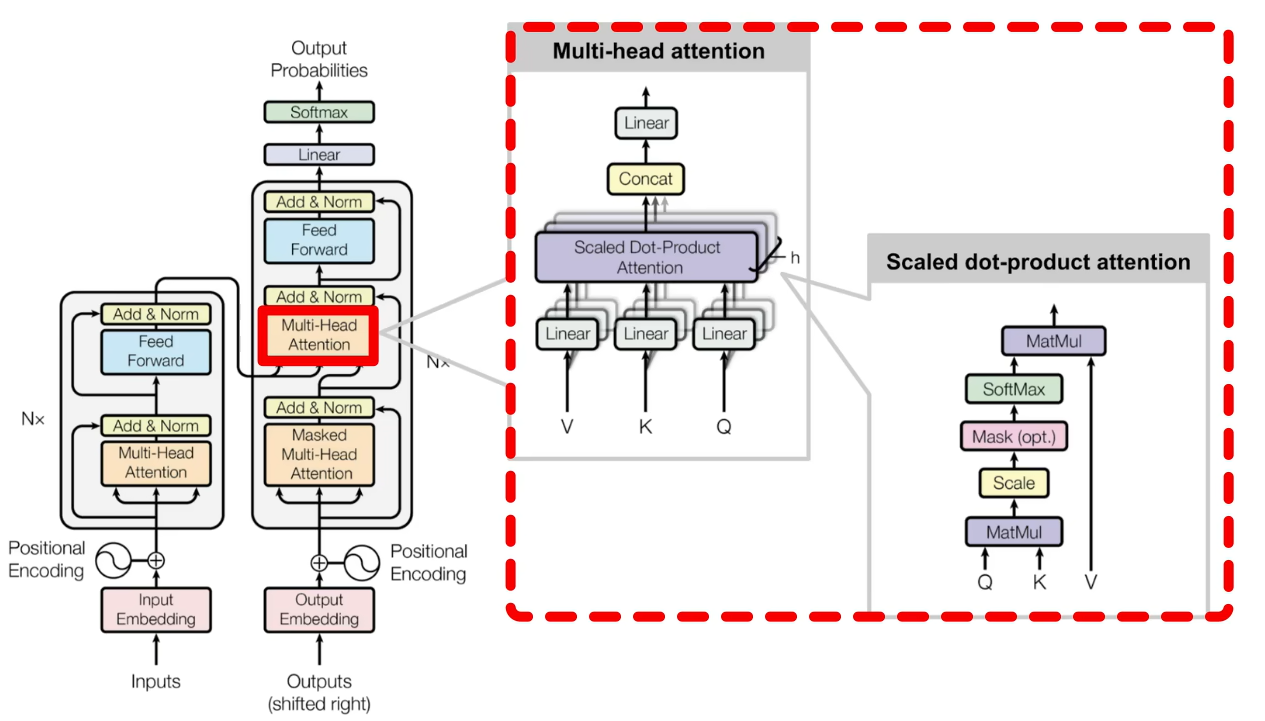
编码器(Encoders):生成带有注意力信息的$\text{Keys}/\text{Values}$向量
- 词嵌入(Token Embedding):根据点积相似度,将离散的词符号映射到$d_{\text{model}}$维向量空间中
- 位置编码(Positional Encoding):向词向量中添加其在句子中先后关系的信息
$$ PE_{(pos, 2i)} = \sin\left(\frac{pos}{10000^{2i/d_{\text{model}}}}\right) \ PE_{(pos, 2i+1)} = \cos\left(\frac{pos}{10000^{2i/d_{\text{model}}}}\right) \
\mathbf{h}_i = \mathbf{e}_w + \mathbf{p}_i $$
自注意力机制(Self–Attention):利用三个线性变换矩阵$\text{W}_q、\text{W}_k、\text{W}_v$将每个词向量映射为$\text{Querys}, \text{Keys}, \text{Values}$向量;再以缩放点积的方式计算不同词向量之间$\text{Querys}$-$\text{Keys}$相似度矩阵;针对每个词向量与其他词向量的相似度,与对应值向量$\text{Values}$求加权和,生成具有注意力分配的新词向量表示。一般地,可以将$Q, K, V$均归纳为原始词向量 $$ \mathbf{Q} = \mathbf{X}\mathbf{W}_Q, \mathbf{K} = \mathbf{X}\mathbf{W}_K, \mathbf{V} = \mathbf{X}\mathbf{W}_V \
\text{Attention}(Q, K, V) = \text{softmax}\left(\frac{QK^\top}{\sqrt{d_k}}\right)V $$
多头注意力机制(Multi-Headed Attention):并行化多组$\text{W}_q、\text{W}_k、\text{W}_v$注意力头,学习不同投影子空间的特征,将不同头输出拼接起来,维度不发生变化,从而捕获输入序列中不同类型的依赖关系,增强模型的表征能力
跳跃连接(Skip Connection)
层标准化(Layer Normalize):$ \gamma, \beta$持续训练,对某一词向量调整(统一量纲、移动数据分布区间到激活函数高梯度范围),加快模型收敛速度,使模型更稳定;解决小批量训练时,小批量无法体现总体特征的问题;
$$ y_i = \gamma \cdot \left( \frac{x_i - \mu_L}{\sqrt{\sigma_L^2 + \epsilon}} \right) + \beta \\ \mu_L = \frac{1}{m}\sum_{i=1}^m x_i \quad \sigma_L^2 = \frac{1}{m}\sum_{i=1}^m (x_i - \mu_L)^2 \quad \epsilon > 0 \quad \gamma, \beta $$
解码器(Decoders):根据编码器的$\text{Keys}/\text{Values}$向量,以当前输入$\text{Querys}$,自回归以token:BEGIN、END生成文本序列
- 掩码多头注意力机制(Masked Multi-Headed Attention):利用$\text{Look-Ahead Mask}$矩阵抹去相似度矩阵中$\text{Querys}$先于$\text{Keys}$部分的相似度
- 交互多头注意力机制(Interactive Multi-Headed Attention):编码器输出$\text{Keys}/\text{Values}$向量,掩码多头注意力机制层输出$\text{Values}$向量,以这些作为为输入,确定焦点编码器
扩展:复制机制、引导注意力机制、beam search、随机噪声、强化学习、鲁棒样本
优点:可小批量,可并行化,复杂模型弹性大,小数据集过拟合,大数据集损失低(对比简单模型弹性小,小数据集训练快,大数据集损失大)
缺点:超参敏感、优化困难
| strcture | position | activation | LN |
|---|---|---|---|
| Encoder - Decoder | Sinusoidal | ReLU | Post LN |
| Encoder only | 绝对位置 | GeLU | Pre LN |
| Dncoder only | RoPE | SwiGLU | Post Deep LN |
| Casual Encoder | ALiBi | GeGLU | Pre RMS LN |
| Casual Decoder | |||
| Prefix Decoder |