规控
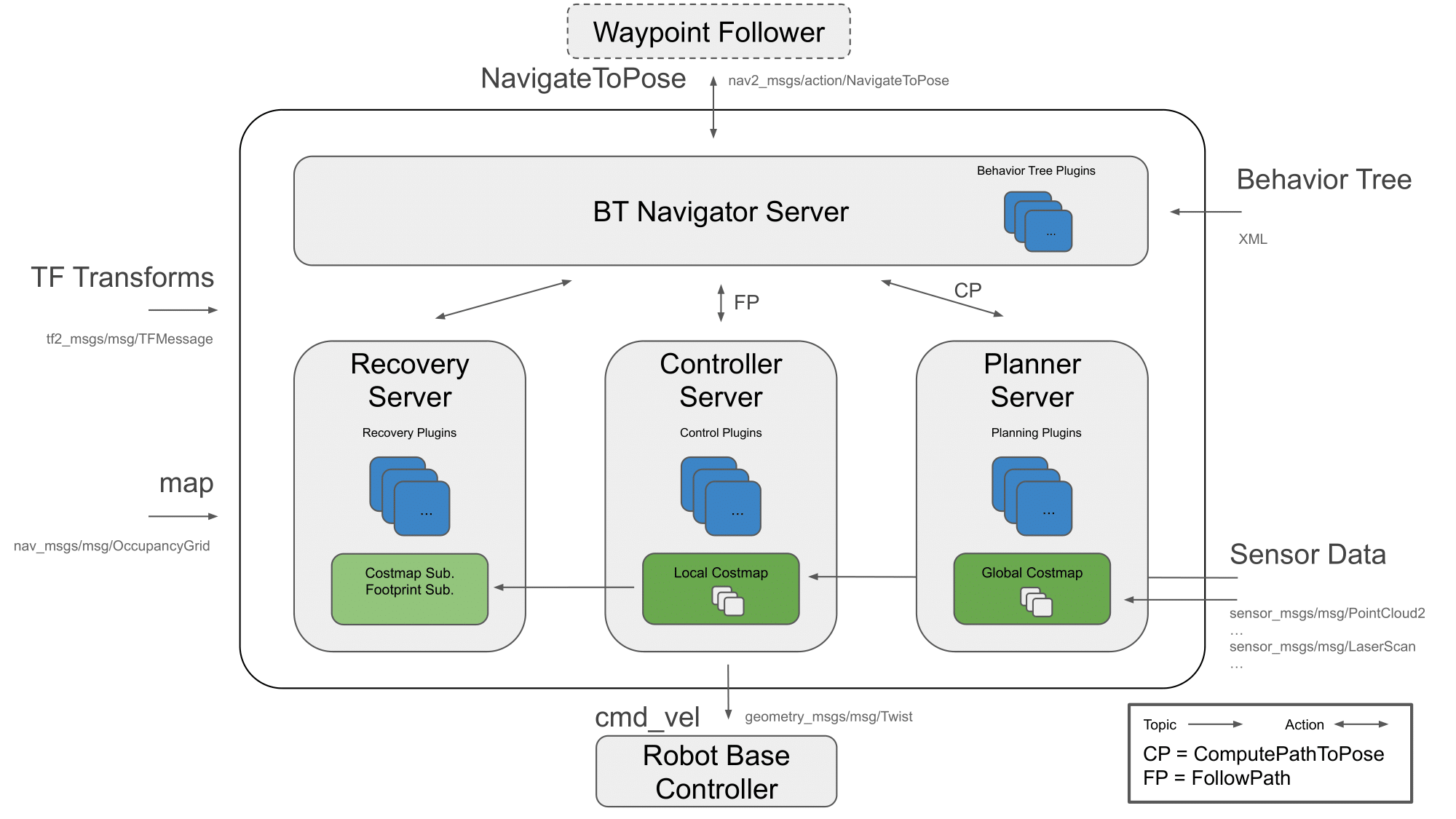
动态加载和卸载插件(ClassLoader加载动态链接库–抽象类子类),如控制器、传感器、规划器,下图所示:
几个规划消息:
ros2 interface proto geometry_msgs/msg/PoseStamped位置
header:
stamp:
sec: 0
nanosec: 0
frame_id: ''
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
ros2 interface proto nav_msgs/msg/OccupancyGrid栅格地图header: stamp: sec: 0 nanosec: 0 frame_id: '' info: map_load_time: sec: 0 nanosec: 0 resolution: 0.0 width: 0 height: 0 origin: position: x: 0.0 y: 0.0 z: 0.0 orientation: x: 0.0 y: 0.0 z: 0.0 w: 1.0 data: []ros2 interface proto nav_msgs/msg/Path路径header: stamp: sec: 0 nanosec: 0 frame_id: '' poses: []像素坐标(row_index, col_index)与实际坐标(x, y)的转换
- 实际坐标支持右手坐标系,原点为origin
- 图像坐标y轴向下,x轴向右,原点在图像左上角
more to check:Nav2 中文网
pluginlib流程
- 依赖于
pluginlib
ros2 pkg create motion_control_system --dependencies pluginlib
[package_name]\include\[package_name]下编写头文件motion_control_interface.hpp,即抽象类编写规范
#ifndef MOTION_CONTROL_INTERFACE_HPP
#define MOTION_CONTROL_INTERFACE_HPP
namespace motion_control_system {
class MotionController
{
private:
public:
virtual void start() = 0;
virtual void stop() = 0;
};
}
#endif // MOTION_CONTROL_INTERFACE_HPP
[package_name]/include/[package_name]下编写插件spin_motion_controller.hpp,即子类编写规范
#ifndef SPIN_MOTION_CONTROLLER_HPP
#define SPIN_MOTION_CONTROLLER_HPP
#include "motion_control_system/motion_control_interface.hpp"
namespace motion_control_system {
class SpinMotionController: public MotionController
{
private:
public:
void start() override;
void stop() override;
};
}
#endif // SPIN_MOTION_CONTROLLER_HPP
[package_name]/src下编写插件spin_motion_controller.cpp,即子类定义
#include <iostream>
#include "motion_control_system/spin_motion_controller.hpp"
namespace motion_control_system {
void SpinMotionController::start()
{
std::cout << "SpinMotionController::start" << std::endl;
}
void SpinMotionController::stop()
{
std::cout << "SpinMotionController::stop" << std::endl;
}
}
#include "pluginlib/class_list_macros.hpp"
PLUGINLIB_EXPORT_CLASS(motion_control_system::SpinMotionController, motion_control_system::MotionController)
[package_name]下配置CmakeList.txt,创建spin_motion_plugin.xml;此时,install/[package_name]/lib下生成插件动态链接库
# find dependencies
find_package(ament_cmake REQUIRED)
find_package(pluginlib REQUIRED)
include_directories(include)
set(library_name ${PROJECT_NAME}_plugin)
add_library(${library_name} SHARED src/spin_motion_controller.cpp)
ament_target_dependencies(${library_name} pluginlib)
install(TARGETS ${library_name}
ARCHIVE DESTINATION lib
LIBRARY DESTINATION lib
RUNTIME DESTINATION bin
)
install(DIRECTORY include/
DESTINATION include/
)
# pluginlib_export_xml
pluginlib_export_plugin_description_file(motion_control_system spin_motion_plugin.xml)
# 这里编译了 hpp -> cpp -> exe,即${PROJECT_NAME}_plugin;然后要求导出到 motion_control_system spin_motion_plugin.xml
<library path="motion_control_system_plugin">
<class name="motion_control_system/SpinMotionController" type="motion_control_system::SpinMotionController" base_class_type="motion_control_system::MotionController">
<description>Spin Motion Controller</description>
</class>
</library>
<!--- 在 motion_control_system spin_motion_plugin.xml 中,将 exe(${PROJECT_NAME}_plugin) 引出为插件类 motion_control_system/SpinMotionController--->
- 使用插件
#include "motion_control_system/motion_control_interface.hpp"
#include <pluginlib/class_loader.hpp>
int main(int argc, char **argv) {
if (argc != 2) return 0;
std::string controller_name = argv[1];
pluginlib::ClassLoader<motion_control_system::MotionController>
controller_loader("motion_control_system", "motion_control_system::MotionController");
auto controller = controller_loader.createSharedInstance(controller_name);
controller->start();
controller->stop();
return 0;
}
规划器Plugin
- 依赖于
nav2_core
ros2 pkg create nav2_custom_planner --dependencies pluginlib nav2_core
[package_name]/include/[package_name]下编写插件nav2_custom_planner.hpp,即nav2_core::GlobalPlanner子类编写规范
#ifndef NAV2_CUSTOM_PLANNER__NAV2_CUSTOM_PLANNER_HPP_
#define NAV2_CUSTOM_PLANNER__NAV2_CUSTOM_PLANNER_HPP_
#include <memory>
#include <string>
#include "geometry_msgs/msg/point.hpp"
#include "geometry_msgs/msg/pose_stamped.hpp"
#include "nav2_costmap_2d/costmap_2d_ros.hpp"
#include "nav_msgs/msg/path.hpp"
#include "nav2_core/global_planner.hpp"
#include "rclcpp/rclcpp.hpp"
#include "nav2_util/lifecycle_node.hpp"
#include "nav2_util/robot_utils.hpp"
namespace nav2_custom_planner {
class CustomPlanner : public nav2_core::GlobalPlanner
{
public:
CustomPlanner() = default;
~CustomPlanner() = default;
// 插件配置方法
void configure(
const rclcpp_lifecycle::LifecycleNode::WeakPtr &parent, std::string name,
std::shared_ptr<tf2_ros::Buffer> tf,
std::shared_ptr<nav2_costmap_2d::Costmap2DROS> costmap_ros) override;
// 插件清理方法
void cleanup() override;
// 插件激活方法
void activate() override;
// 插件停用方法
void deactivate() override;
// 为给定的起始和目标位姿创建路径的方法
nav_msgs::msg::Path createPlan(const geometry_msgs::msg::PoseStamped &start,
const geometry_msgs::msg::PoseStamped &goal) override;
private:
// 坐标变换缓存指针,可用于查询坐标关系
std::shared_ptr<tf2_ros::Buffer> tf_;
// 节点指针
nav2_util::LifecycleNode::SharedPtr node_;
// 全局代价地图
nav2_costmap_2d::Costmap2D *costmap_;
// 全局代价地图的坐标系
std::string global_frame_, name_;
// 插值分辨率
double interpolation_resolution_;
};
}
#endif // NAV2_CUSTOM_PLANNER__NAV2_CUSTOM_PLANNER_HPP_
[package_name]/src下编写插件nav2_custom_planner.cpp,即子类定义
#include <cmath>
#include <memory>
#include <string>
#include "nav2_util/node_utils.hpp"
#include "nav2_core/exceptions.hpp"
#include "nav2_custom_planner/nav2_custom_planner.hpp"
// name_、node_、tf_、costmap_、global_frame_、interpolation_resolution_
// start、end、path
namespace nav2_custom_planner
{
void CustomPlanner::configure(
const rclcpp_lifecycle::LifecycleNode::WeakPtr &parent, std::string name,
std::shared_ptr<tf2_ros::Buffer> tf,
std::shared_ptr<nav2_costmap_2d::Costmap2DROS> costmap_ros)
{
name_ = name;
node_ = parent.lock();
tf_ = tf;
costmap_ = costmap_ros->getCostmap();
global_frame_ = costmap_ros->getGlobalFrameID();
// 参数初始化
nav2_util::declare_parameter_if_not_declared(
node_, name_ + ".interpolation_resolution", rclcpp::ParameterValue(0.1));
node_->get_parameter(name_ + ".interpolation_resolution",
interpolation_resolution_);
}
void CustomPlanner::cleanup()
{
RCLCPP_INFO(node_->get_logger(), "正在清理类型为 CustomPlanner 的插件 %s", name_.c_str());
}
void CustomPlanner::activate()
{
RCLCPP_INFO(node_->get_logger(), "正在激活类型为 CustomPlanner 的插件 %s", name_.c_str());
}
void CustomPlanner::deactivate()
{
RCLCPP_INFO(node_->get_logger(), "正在停用类型为 CustomPlanner 的插件 %s", name_.c_str());
}
nav_msgs::msg::Path
CustomPlanner::createPlan(const geometry_msgs::msg::PoseStamped &start,
const geometry_msgs::msg::PoseStamped &goal)
{
// 1.声明并初始化 global_path
nav_msgs::msg::Path global_path;
global_path.poses.clear();
global_path.header.stamp = node_->now();
global_path.header.frame_id = global_frame_;
// 2.检查目标和起始状态是否在全局坐标系中
if (start.header.frame_id != global_frame_)
{
RCLCPP_ERROR(node_->get_logger(), "规划器仅接受来自 %s 坐标系的起始位置",
global_frame_.c_str());
return global_path;
}
if (goal.header.frame_id != global_frame_)
{
RCLCPP_INFO(node_->get_logger(), "规划器仅接受来自 %s 坐标系的目标位置",
global_frame_.c_str());
return global_path;
}
// 3.计算当前插值分辨率 interpolation_resolution_ 下的循环次数和步进值
int total_number_of_loop =
std::hypot(goal.pose.position.x - start.pose.position.x,
goal.pose.position.y - start.pose.position.y) /
interpolation_resolution_;
double x_increment =
(goal.pose.position.x - start.pose.position.x) / total_number_of_loop;
double y_increment =
(goal.pose.position.y - start.pose.position.y) / total_number_of_loop;
// 4. 生成路径
for (int i = 0; i < total_number_of_loop; ++i)
{
geometry_msgs::msg::PoseStamped pose; // 生成一个点
pose.pose.position.x = start.pose.position.x + x_increment * i;
pose.pose.position.y = start.pose.position.y + y_increment * i;
pose.pose.position.z = 0.0;
pose.header.stamp = node_->now();
pose.header.frame_id = global_frame_;
// 将该点放到路径中
global_path.poses.push_back(pose);
}
// 5.使用 costmap 检查该条路径是否经过障碍物
for (geometry_msgs::msg::PoseStamped pose : global_path.poses)
{
unsigned int mx, my; // 将点的坐标转换为栅格坐标
if (costmap_->worldToMap(pose.pose.position.x, pose.pose.position.y, mx, my))
{
unsigned char cost = costmap_->getCost(mx, my); // 获取对应栅格的代价值
// 如果存在致命障碍物则抛出异常
if (cost == nav2_costmap_2d::LETHAL_OBSTACLE)
{
RCLCPP_WARN(node_->get_logger(),"在(%f,%f)检测到致命障碍物,规划失败。",
pose.pose.position.x, pose.pose.position.y);
throw nav2_core::PlannerException(
"无法创建目标规划: " + std::to_string(goal.pose.position.x) + "," +
std::to_string(goal.pose.position.y));
}
}
}
// 6.收尾,将目标点作为路径的最后一个点并返回路径
geometry_msgs::msg::PoseStamped goal_pose = goal;
goal_pose.header.stamp = node_->now();
goal_pose.header.frame_id = global_frame_;
global_path.poses.push_back(goal_pose);
return global_path;
}
}
#include "pluginlib/class_list_macros.hpp"
PLUGINLIB_EXPORT_CLASS(nav2_custom_planner::CustomPlanner, nav2_core::GlobalPlanner)
- 配置
CmakeList.txt、custom_planner_plugin.xml和package.xml
# find dependencies
find_package(ament_cmake REQUIRED)
find_package(pluginlib REQUIRED)
find_package(nav2_core REQUIRED)
include_directories(include)
set(library_name custom_pathplanner_plugin)
add_library(${library_name} SHARED src/nav2_custom_planner.cpp)
ament_target_dependencies(${library_name} pluginlib nav2_core)
install(TARGETS ${library_name}
ARCHIVE DESTINATION lib
LIBRARY DESTINATION lib
RUNTIME DESTINATION bin
)
install(DIRECTORY include/
DESTINATION include/
)
# pluginlib_export_xml
pluginlib_export_plugin_description_file(nav2_core custom_planner_plugin.xml)
<library path="custom_pathplanner_plugin">
<class name="nav2_custom_planner/CustomPlanner" type="nav2_custom_planner::CustomPlanner" base_class_type="nav2_core::GlobalPlanner">
<description>CustomPathPlanner</description>
</class>
</library>
<export>
<build_type>ament_cmake</build_type>
<nav2_core plugin="${prefix}/custom_planner_plugin.xml" />
</export>
- 加入导航配置
nav2_params.yaml中
planner_server:
ros__parameters:
expected_planner_frequency: 20.0
use_sim_time: True
planner_plugins: ["GridBased"]
GridBased:
plugin: "nav2_custom_planner/CustomPlanner"
# 也可以以使用 type 属性 nav2_custom_planner::CustomPlanner
interpolation_resolution: 0.1
控制器Plugin
- 依赖于
nav2_core
ros2 pkg create nav2_custom_controller --dependencies pluginlib nav2_core
[package_name]/include/[package_name]下编写插件nav2_custom_controller.hpp,即nav2_core::Controller子类编写规范
#ifndef NAV2_CUSTOM_CONTROLLER__NAV2_CUSTOM_CONTROLLER_HPP_
#define NAV2_CUSTOM_CONTROLLER__NAV2_CUSTOM_CONTROLLER_HPP_
#include <memory>
#include <string>
#include <vector>
#include "nav2_core/controller.hpp"
#include "rclcpp/rclcpp.hpp"
#include "nav2_util/robot_utils.hpp"
namespace nav2_custom_controller {
class CustomController : public nav2_core::Controller {
public:
CustomController() = default;
~CustomController() override = default;
void configure(
const rclcpp_lifecycle::LifecycleNode::WeakPtr &parent, std::string name,
std::shared_ptr<tf2_ros::Buffer> tf,
std::shared_ptr<nav2_costmap_2d::Costmap2DROS> costmap_ros) override;
void cleanup() override;
void activate() override;
void deactivate() override;
geometry_msgs::msg::TwistStamped
computeVelocityCommands(const geometry_msgs::msg::PoseStamped &pose,
const geometry_msgs::msg::Twist &velocity,
nav2_core::GoalChecker * goal_checker) override;
void setPlan(const nav_msgs::msg::Path &path) override;
void setSpeedLimit(const double &speed_limit,
const bool &percentage) override;
protected:
// 存储插件名称
std::string plugin_name_;
// 存储坐标变换缓存指针,可用于查询坐标关系
std::shared_ptr<tf2_ros::Buffer> tf_;
// 存储代价地图
std::shared_ptr<nav2_costmap_2d::Costmap2DROS> costmap_ros_;
// 存储节点指针
nav2_util::LifecycleNode::SharedPtr node_;
// 参数:最大线速度角速度
double max_angular_speed_;
double max_linear_speed_;
// 存储全局代价地图
nav2_costmap_2d::Costmap2D *costmap_;
// 存储 setPlan 提供的全局路径
nav_msgs::msg::Path global_plan_;
// 获取路径中距离当前点最近的点
geometry_msgs::msg::PoseStamped
getNearestTargetPose(const geometry_msgs::msg::PoseStamped ¤t_pose);
// 计算目标点方向和当前位置的角度差
double
calculateAngleDifference(const geometry_msgs::msg::PoseStamped ¤t_pose,
const geometry_msgs::msg::PoseStamped &target_pose);
};
}
#endif // NAV2_CUSTOM_CONTROLLER__NAV2_CUSTOM_CONTROLLER_HPP_
[package_name]/src下编写插件nav2_custom_controller.cpp,即子类定义
#include "nav2_custom_controller/nav2_custom_controller.hpp"
#include "nav2_core/exceptions.hpp"
#include "nav2_util/geometry_utils.hpp"
#include "nav2_util/node_utils.hpp"
#include <algorithm>
#include <chrono>
#include <iostream>
#include <memory>
#include <string>
#include <thread>
// plugin_name_、node_、tf_、costmap_ros_、max_linear_speed、max_angular_speed
//
namespace nav2_custom_controller
{
void CustomController::configure(const rclcpp_lifecycle::LifecycleNode::WeakPtr &parent, std::string name,
std::shared_ptr<tf2_ros::Buffer> tf, std::shared_ptr<nav2_costmap_2d::Costmap2DROS> costmap_ros)
{
plugin_name_ = name;
node_ = parent.lock();
tf_ = tf;
costmap_ros_ = costmap_ros;
// 声明并获取参数,设置最大线速度和最大角速度
nav2_util::declare_parameter_if_not_declared(
node_, plugin_name_ + ".max_linear_speed", rclcpp::ParameterValue(0.1));
node_->get_parameter(plugin_name_ + ".max_linear_speed", max_linear_speed_);
nav2_util::declare_parameter_if_not_declared(
node_, plugin_name_ + ".max_angular_speed", rclcpp::ParameterValue(1.0));
node_->get_parameter(plugin_name_ + ".max_angular_speed", max_angular_speed_);
}
void CustomController::cleanup()
{
RCLCPP_INFO(node_->get_logger(), "清理控制器:%s 类型为 nav2_custom_controller::CustomController", plugin_name_.c_str());
}
void CustomController::activate()
{
RCLCPP_INFO(node_->get_logger(), "激活控制器:%s 类型为 nav2_custom_controller::CustomController", plugin_name_.c_str());
}
void CustomController::deactivate()
{
RCLCPP_INFO(node_->get_logger(), "停用控制器:%s 类型为 nav2_custom_controller::CustomController", plugin_name_.c_str());
}
geometry_msgs::msg::TwistStamped CustomController::computeVelocityCommands(
const geometry_msgs::msg::PoseStamped &pose,
const geometry_msgs::msg::Twist &, nav2_core::GoalChecker *) {
// 1. 检查路径是否为空
if (global_plan_.poses.empty()) {
throw nav2_core::PlannerException("收到长度为零的路径");
}
// 2.将机器人当前姿态转换到全局计划坐标系中
geometry_msgs::msg::PoseStamped pose_in_globalframe;
if (!nav2_util::transformPoseInTargetFrame(
pose, pose_in_globalframe, *tf_, global_plan_.header.frame_id, 0.1)) {
throw nav2_core::PlannerException("无法将机器人姿态转换为全局计划的坐标系");
}
// 3.获取最近的目标点和计算角度差
auto target_pose = getNearestTargetPose(pose_in_globalframe);
auto angle_diff = calculateAngleDifference(pose_in_globalframe, target_pose);
// 4.根据角度差计算线速度和角速度
geometry_msgs::msg::TwistStamped cmd_vel;
cmd_vel.header.frame_id = pose_in_globalframe.header.frame_id;
cmd_vel.header.stamp = node_->get_clock()->now();
// 根据角度差计算速度,角度差大于 0.3 则原地旋转,否则直行
if (fabs(angle_diff) > M_PI/10.0) {
cmd_vel.twist.linear.x = .0;
cmd_vel.twist.angular.z = fabs(angle_diff) / angle_diff * max_angular_speed_;
} else {
cmd_vel.twist.linear.x = max_linear_speed_;
cmd_vel.twist.angular.z = .0;
}
RCLCPP_INFO(node_->get_logger(), "控制器:%s 发送速度(%f,%f)",
plugin_name_.c_str(), cmd_vel.twist.linear.x,
cmd_vel.twist.angular.z);
return cmd_vel;
}
void CustomController::setSpeedLimit(const double &speed_limit,
const bool &percentage) {
(void)percentage;
(void)speed_limit;
}
void CustomController::setPlan(const nav_msgs::msg::Path &path) {
global_plan_ = path;
}
geometry_msgs::msg::PoseStamped CustomController::getNearestTargetPose(
const geometry_msgs::msg::PoseStamped ¤t_pose) {
// 1.遍历路径获取路径中距离当前点最近的索引,存储到 nearest_pose_index
using nav2_util::geometry_utils::euclidean_distance;
int nearest_pose_index = 0;
double min_dist = euclidean_distance(current_pose, global_plan_.poses.at(0));
for (unsigned int i = 1; i < global_plan_.poses.size(); i++) {
double dist = euclidean_distance(current_pose, global_plan_.poses.at(i));
if (dist < min_dist) {
nearest_pose_index = i;
min_dist = dist;
}
}
// 2.从路径中擦除头部到最近点的路径
global_plan_.poses.erase(std::begin(global_plan_.poses),
std::begin(global_plan_.poses) + nearest_pose_index);
// 3.如果只有一个点则直接,否则返回最近点的下一个点
if (global_plan_.poses.size() == 1) {
return global_plan_.poses.at(0);
}
return global_plan_.poses.at(1);
}
double CustomController::calculateAngleDifference(
const geometry_msgs::msg::PoseStamped ¤t_pose,
const geometry_msgs::msg::PoseStamped &target_pose) {
// 计算当前姿态与目标姿态之间的角度差
// 1. 获取当前角度
float current_robot_yaw = tf2::getYaw(current_pose.pose.orientation);
// 2.获取目标点朝向
float target_angle =
std::atan2(target_pose.pose.position.y - current_pose.pose.position.y,
target_pose.pose.position.x - current_pose.pose.position.x);
// 3.计算角度差,并转换到 -M_PI 到 M_PI 之间
double angle_diff = target_angle - current_robot_yaw;
if (angle_diff < -M_PI) {
angle_diff += 2.0 * M_PI;
} else if (angle_diff > M_PI) {
angle_diff -= 2.0 * M_PI;
}
return angle_diff;
}
}
#include "pluginlib/class_list_macros.hpp"
PLUGINLIB_EXPORT_CLASS(nav2_custom_controller::CustomController, nav2_core::Controller)
- 配置
CmakeList.txt、custom_planner_plugin.xml和package.xml
# find dependencies
find_package(ament_cmake REQUIRED)
find_package(pluginlib REQUIRED)
find_package(nav2_core REQUIRED)
include_directories(include)
set(library_name custom_controller_plugin)
add_library(${library_name} SHARED src/nav2_custom_controller.cpp)
ament_target_dependencies(${library_name} pluginlib nav2_core)
install(TARGETS ${library_name}
ARCHIVE DESTINATION lib
LIBRARY DESTINATION lib
RUNTIME DESTINATION bin
)
install(DIRECTORY include/
DESTINATION include/
)
# pluginlib_export_xml
pluginlib_export_plugin_description_file(nav2_core custom_controller_plugin.xml)
<library path="custom_controller_plugin">
<class name="nav2_custom_controller/CustomController" type="nav2_custom_controller::CustomController" base_class_type="nav2_core::Controller">
<description>CustomController</description>
</class>
</library>
<export>
<build_type>ament_cmake</build_type>
<nav2_core plugin="${prefix}/custom_controller_plugin.xml" />
</export>
- 加入导航配置
nav2_params.yaml中
controller_server:
ros__parameters:
...
FollowPath:
plugin: "robot_navigation/CustomController"
max_linear_speed: 0.1
max_angular_speed: 1.0