前言
经过第一轮 ROS2 入门的学习,基本掌握了如何在各节点之间进行信息通信,但要构建一个完整的机器人系统仍有很长的路要走。
“机器人是一种高度复杂的系统性实现,机器人设计包含了机械结构设计、机械加工、硬件设计、嵌入式软件设计、上层软件设计等诸多模块,是各种硬件与软件的有机结合,甚至可以说机器人系统是当今工业体系的集大成者。机器人体系是相当庞大的,其复杂度之高,以至于没有任何个人、组织甚至公司能够独立完成系统性的机器人研发生产任务。
一种更合适的策略是:让机器人研发者专注于自己擅长的领域,其他模块则直接复用相关领域更专业研发团队的实现,当然自身的研究也可以被他人继续复用。这种基于“复用”的分工协作,遵循了不重复发明轮子的原则,显然是可以大大提高机器人的研发效率的,尤其是随着机器人硬件越来越丰富,软件库越来越庞大,这种复用性和模块化开发需求也愈发强烈。”
因此,接下来,我们需要具备调用功能包搭建机器人软件层的能力,再进一步,是深入自己感兴趣的领域,研究底层算法以优化机器人系统性能!到这里,鱼香ROS机器人是一个不错的参考,当然,还包括ROS2的各个社区,如Welcome to ROS 2 workshop! — ROS 2 workshop documentation
建模与仿真
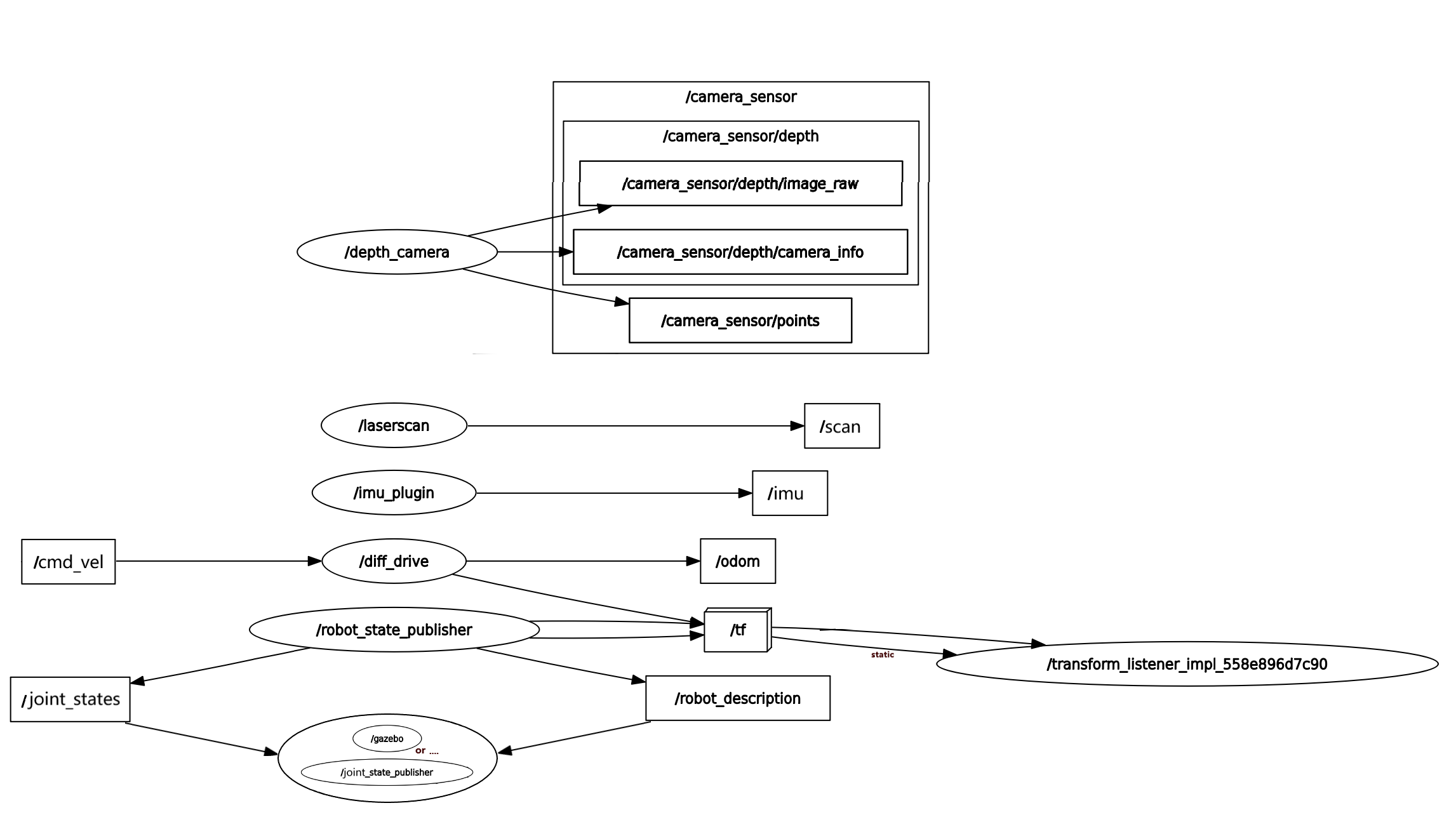
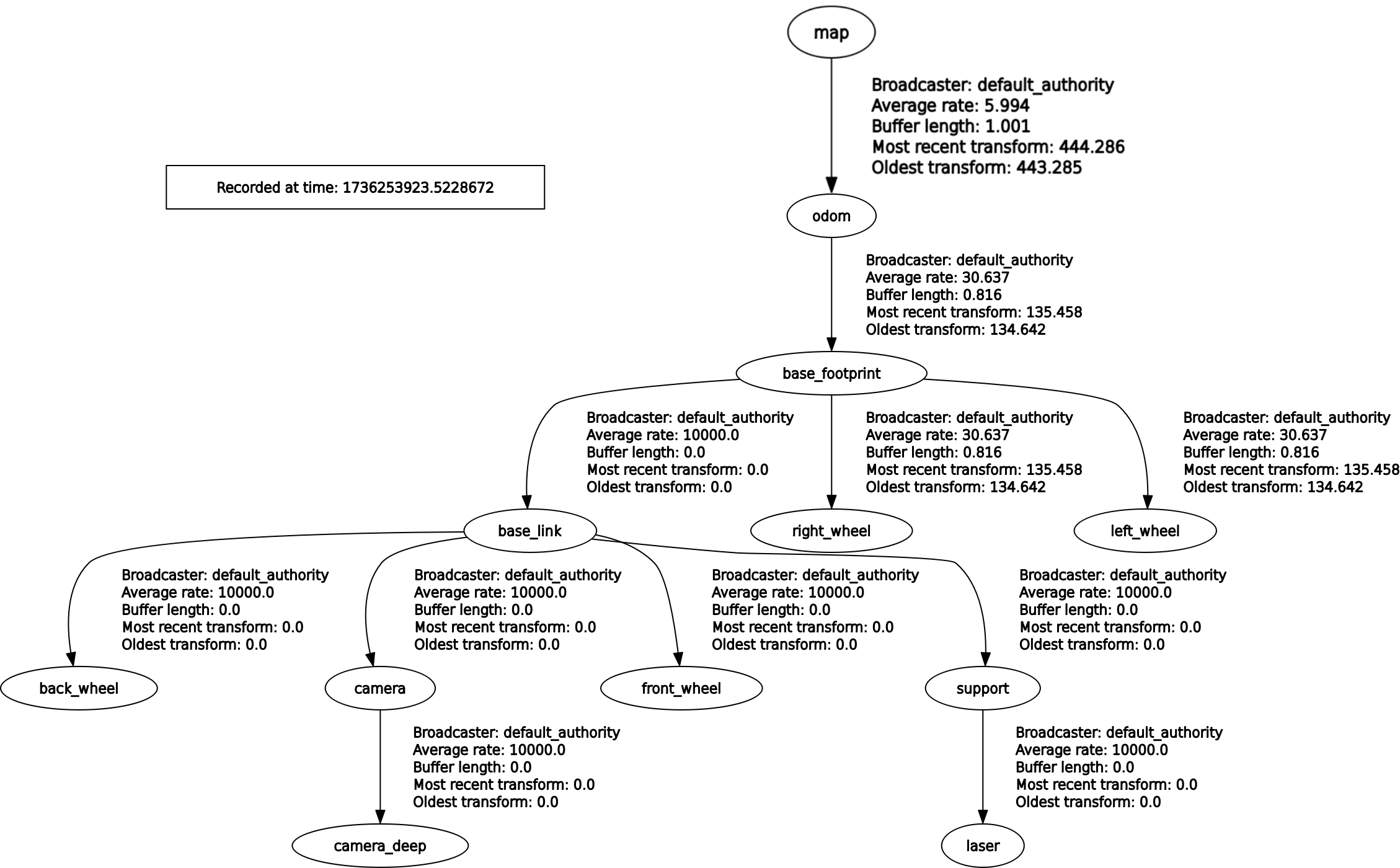
通过这一节对机器人的建模与仿真,我们可以得到机器人结构tf、机器人控制与传感器信息
rqt计算图如下:
机器人部件tf_tree如下:
一份urdf-gazebo-rviz的launch示例如下:
from launch import LaunchDescription
from launch_ros.actions import Node
import os
from ament_index_python.packages import get_package_share_directory
from launch_ros.parameter_descriptions import ParameterValue
from launch.substitutions import Command,LaunchConfiguration
from launch.actions import DeclareLaunchArgument,IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
from launch.actions import ExecuteProcess
from launch.event_handlers import OnProcessExit
from launch.actions import RegisterEventHandler
def generate_launch_description():
default_package_dir = get_package_share_directory("[package_name]")
default_rviz_path = os.path.join(default_package_dir,"rviz","[config].rviz")
default_model_path = os.path.join(default_package_dir,"urdf/xacro","[model].xacro")
default_world_path = os.path.join(default_package_dir,"worlds","[env].world")
model = DeclareLaunchArgument(name="model", default_value=default_model_path)
world = DeclareLaunchArgument(name="world", default_value=default_world_path)
robot_description = ParameterValue(Command(["xacro ",LaunchConfiguration("model")]))
robot_state_publisher = Node(
package="robot_state_publisher",
executable="robot_state_publisher",
parameters=[{"robot_description": robot_description}]
)
joint_state_publisher = Node(
package="joint_state_publisher",
executable="joint_state_publisher"
)
rviz2 = Node(
package="rviz2",
executable="rviz2",
arguments=["-d", default_rviz_path]
)
action_launch_gazebo = IncludeLaunchDescription(
launch_description_source = PythonLaunchDescriptionSource(
launch_file_path=os.path.join(
get_package_share_directory("gazebo_ros"),
"launch",
"gazebo.launch.py"
)
),
launch_arguments = {
"world": LaunchConfiguration("world"),
"verbose": "true",
}.items()
)
action_spawn_entity = Node(
package="gazebo_ros",
executable="spawn_entity.py",
arguments=["-topic", "/robot_description", "-entity", "[model_name]", ]
)
action_load_joint_state_controller = ExecuteProcess(
cmd=["ros2 control load_controller robot_joint_state_broadcaster --set-state active"],
output="both",
shell=True
)
action_load_effort_controller = ExecuteProcess(
cmd=["ros2 control load_controller robot_effort_controller --set-state active"],
output="both",
shell=True
)
return LaunchDescription([
model,
world,
robot_state_publisher,
# joint_state_publisher,
action_launch_gazebo,
action_spawn_entity,
RegisterEventHandler(
event_handler=OnProcessExit(
target_action = action_spawn_entity,
on_exit = [action_load_joint_state_controller],
)
),
RegisterEventHandler(
event_handler=OnProcessExit(
target_action = action_load_joint_state_controller,
on_exit = [action_load_effort_controller],
)
),
# rviz2,
])
ros2 launch [package] [gazebo_sim].launch.py model:=`ros2 pkg prefix --share [package]`/urdf/urdf/[model].urdf
几个要注意的点:
robot_state_publisher发布机器人固定关节部件的static tf,活动关节部件需要joint_state_publisher发布joint states对应dynamic tf。然而,Gazebo与joint_state_publisher冲突,其根据urdf-gazebo标签导入活动关节配置生成对应dynamic tf。
可在~/.gazebo载入gazebo可加载模型用于仿真
由于功能包内部可能存在多处base_frame_id,建议frame_id使用常用名称
urdf:机器人建模
urdf
check_urdf:功能包,检查urdf文件语法,展示urdf机器人结构urdf_to_graphviz:功能包,生成urdf机器人结构图
<?xml version="1.0"?>
<robot name="chassis">
<link name="base_footprint">
<visual>
<geometry>
<sphere radius="0.001" />
</geometry>
</visual>
</link>
<link name="base_link">
<visual>
<geometry>
<cylinder radius="0.1" length="0.08" />
<!-- <box size="0.3 0.2 0.1" /> -->
<!-- <sphere radius="1" /> -->
<!-- <mesh filename="package://[package]/meshes/**.stl" scale="1.0 1.0 1.0"/> -->
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" /> <!-- shift & rotate -->
<material name="base_color">
<color rgba="1.0 0.5 0.5 0.5" />
</material>
</visual>
<!-- <collision> -->
<!-- </collision> -->
<!-- <Inertial> -->
<!-- </Inertial> -->
</link>
<joint name="base2footprint" type="fixed">
<parent link="base_footprint" />
<child link="base_link" />
<origin xyz="0.0 0.0 0.055" rpy="0.0 0.0 0.0" />
<axis xyz="0 0 0" />
</joint>
<link name="left_wheel">
<visual>
<geometry>
<cylinder radius="0.0325" length="0.015" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="1.5708 0.0 0.0" />
<material name="wheel_color">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</visual>
</link>
<joint name="left2base" type="continuous">
<parent link="base_link" />
<child link="left_wheel" />
<origin xyz="0.0 0.1 -0.0225" rpy="0.0 0.0 0.0" />
<axis xyz="0 1 0" />
</joint>
<link name="right_wheel">
<visual>
<geometry>
<cylinder radius="0.0325" length="0.015" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="1.5708 0.0 0.0" />
<material name="wheel_color">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</visual>
</link>
<joint name="right2base" type="continuous">
<parent link="base_link" />
<child link="right_wheel" />
<origin xyz="0.0 -0.1 -0.0225" rpy="0.0 0.0 0.0" />
<axis xyz="0 1 0" />
</joint>
<link name="front_wheel">
<visual>
<geometry>
<sphere radius="0.0075" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
<material name="wheel_color">
<color rgba="1.0 0.5 0.5 0.5" />
</material>
</visual>
</link>
<joint name="front2base" type="continuous">
<parent link="base_link" />
<child link="front_wheel" />
<origin xyz="0.08 0.0 -0.0475" rpy="0.0 0.0 0.0" />
<axis xyz="1 1 1" />
</joint>
<link name="back_wheel">
<visual>
<geometry>
<sphere radius="0.0075" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
<material name="wheel_color">
<color rgba="1.0 0.5 0.5 0.5" />
</material>
</visual>
</link>
<joint name="back2base" type="continuous">
<parent link="base_link" />
<child link="back_wheel" />
<origin xyz="-0.08 0.0 -0.0475" rpy="0.0 0.0 0.0" />
<axis xyz="1 1 1" />
</joint>
</robot>
xacro
xacro:功能包,转化xacro文件为urdf文件
- collision:link子标签,如果机器人link是标准的几何体形状,和link的 visual 属性设置一致即可
- inertial:link子标签,惯性矩阵需结合link的质量与外形参数动态生成,标准球体、圆柱与立方体的惯性矩阵公式封装在inertialhead.xacro
- gazebo:robot子标签,配置gazebo颜色、摩擦、刚度系数等等,添加各传感器的仿真插件(具体见[gazebo:环境仿真](# gazebo:环境仿真)),其需要reference到link
<robot name="model" xmlns:xacro="http://wiki.ros.org/xacro">
<xacro:include filename="inertialhead.xacro" />
<xacro:include filename="base.xacro" />
<xacro:include filename="camera.xacro" />
<xacro:include filename="laser.xacro" />
<xacro:include filename="ros2_control.xacro" />
<xacro:robot_ros2_control />
<xacro:include filename="plugins/move.xacro" />
<!-- <xacro:gazebo_control_plugin /> -->
<xacro:include filename="plugins/laser.xacro" />
<xacro:gazebo_laser_plugin />
<xacro:include filename="plugins/imu.xacro" />
<xacro:gazebo_imu_plugin />
<xacro:include filename="plugins/camera.xacro" />
<xacro:gazebo_camera_plugin />
</robot>
<robot name="inertialhead" xmlns:xacro="http://wiki.ros.org/xacro">
<!-- macrofunc -->
<xacro:macro name="sphere_inertial_matrix" params="m r">
<inertial>
<mass value="${m}" />
<inertia ixx="${2*m*r*r/5}" ixy="0" ixz="0"
iyy="${2*m*r*r/5}" iyz="0"
izz="${2*m*r*r/5}" />
</inertial>
</xacro:macro>
<xacro:macro name="cylinder_inertial_matrix" params="m r h">
<inertial>
<mass value="${m}" />
<inertia ixx="${m*(3*r*r+h*h)/12}" ixy = "0" ixz = "0"
iyy="${m*(3*r*r+h*h)/12}" iyz = "0"
izz="${m*r*r/2}" />
</inertial>
</xacro:macro>
<xacro:macro name="Box_inertial_matrix" params="m l w h">
<inertial>
<mass value="${m}" />
<inertia ixx="${m*(h*h + l*l)/12}" ixy = "0" ixz = "0"
iyy="${m*(w*w + l*l)/12}" iyz= "0"
izz="${m*(w*w + h*h)/12}" />
</inertial>
</xacro:macro>
</robot>
<robot name="base" xmlns:xacro="http://wiki.ros.org/xacro">
<!-- property -->
<xacro:property name="PI" value="3.1415927" />
<xacro:property name="footprint_radius" value="0.001" />
<xacro:property name="base_weight" value="2" />
<xacro:property name="base_radius" value="0.1" />
<xacro:property name="base_length" value="0.08" />
<xacro:property name="ground_distance" value="0.015" />
<xacro:property name="joint_base2footprint_z" value="${base_length / 2 + ground_distance}" />
<xacro:property name="wheel_weight" value="0.05" />
<xacro:property name="wheel_radius" value="0.0325" />
<xacro:property name="wheel_length" value="0.015" />
<xacro:property name="joint_wheel2base_z" value="${(joint_base2footprint_z - wheel_radius) * -1}" />
<xacro:property name="spinwheel_weight" value="0.03" />
<xacro:property name="spinwheel_radius" value="0.0075" />
<xacro:property name="joint_spinwheel2base_z" value="${(joint_base2footprint_z - spinwheel_radius) * -1}" />
<!-- macrofunc -->
<xacro:macro name="wheel_func" params="wheel_name flag" >
<link name="${wheel_name}_wheel">
<visual>
<geometry>
<cylinder radius="${wheel_radius}" length="${wheel_length}" />
<!-- <cylinder radius="${}" length="${}" /> -->
<!-- <box size="${} ${} ${}" /> -->
<!-- <sphere radius="${}" /> -->
<!-- <mesh filename="package://simulation/meshes/autolabor_mini.stl" /> -->
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="${PI / 2} 0.0 0.0" />
<material name="wheel_color">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</visual>
<collision>
<geometry>
<cylinder radius="${wheel_radius}" length="${wheel_length}" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="${PI / 2} 0.0 0.0" />
</collision>
<xacro:cylinder_inertial_matrix m="${wheel_weight}" r="${wheel_radius}" h="${wheel_length}" />
</link>
<gazebo reference="${wheel_name}_wheel">
<material>Gazebo/Black</material> <!-- gazebo color -->
<!-- <mu1 value="20.0"/> -->
<!-- <mu2 value="20.0"/> -->
<!-- <kp value="100000000.0"/> -->
<!-- <kd value="1.0"/> -->
</gazebo>
<joint name="${wheel_name}2base" type="continuous">
<parent link="base_link" />
<child link="${wheel_name}_wheel" />
<origin xyz="0.0 ${0.1 * flag} ${joint_wheel2base_z}" rpy="0.0 0.0 0.0" />
<axis xyz="0 1 0" />
</joint>
</xacro:macro>
<xacro:macro name="spinwheel_func" params="spinwheel_name flag" >
<link name="${spinwheel_name}_wheel">
<visual>
<geometry>
<sphere radius="${spinwheel_radius}" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
<material name="wheel_color">
<color rgba="1.0 0.5 0.5 0.5" />
</material>
</visual>
<collision>
<geometry>
<sphere radius="${spinwheel_radius}" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
</collision>
<xacro:sphere_inertial_matrix m="${spinwheel_weight}" r="${spinwheel_radius}" />
</link>
<gazebo reference="${spinwheel_name}_wheel">
<material>Gazebo/Black</material>
</gazebo>
<joint name="${spinwheel_name}2base" type="continuous">
<parent link="base_link" />
<child link="${spinwheel_name}_wheel" />
<origin xyz="${0.08 * flag} 0.0 ${joint_spinwheel2base_z}" rpy="0.0 0.0 0.0" />
<axis xyz="1 1 1" />
</joint>
</xacro:macro>
<!-- xacro2urdf -->
<link name="base_footprint">
<visual>
<geometry>
<sphere radius="${footprint_radius}" />
</geometry>
</visual>
</link>
<link name="base_link">
<visual>
<geometry>
<cylinder radius="${base_radius}" length="${base_length}" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
<material name="base_color">
<color rgba="1.0 0.5 0.5 0.5" />
</material>
</visual>
<collision>
<geometry>
<cylinder radius="${base_radius}" length="${base_length}" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
</collision>
<xacro:cylinder_inertial_matrix m="${base_weight}" r="${base_radius}" h="${base_length}" />
</link>
<gazebo reference="base_link">
<material>Gazebo/Green</material>
</gazebo>
<joint name="base2footprint" type="fixed">
<parent link="base_footprint" />
<child link="base_link" />
<origin xyz="0.0 0.0 ${joint_base2footprint_z}" rpy="0.0 0.0 0.0" />
<axis xyz="0 0 0" />
</joint>
<xacro:wheel_func wheel_name="left" flag="1" />
<xacro:wheel_func wheel_name="right" flag="-1" />
<xacro:spinwheel_func spinwheel_name="front" flag="1" />
<xacro:spinwheel_func spinwheel_name="back" flag="-1" />
</robot>
<robot name="laser" xmlns:xacro="http://wiki.ros.org/xacro">
<!-- property -->
<xacro:property name="support_weight" value="0.02" />
<xacro:property name="support_radius" value="0.01" />
<xacro:property name="support_length" value="0.15" />
<xacro:property name="laser_weight" value="0.1" />
<xacro:property name="laser_radius" value="0.03" />
<xacro:property name="laser_length" value="0.05" />
<xacro:property name="joint_support2base_x" value="0.0" />
<xacro:property name="joint_support2base_y" value="0.0" />
<xacro:property name="joint_support2base_z" value="${base_length / 2 + support_length / 2}" />
<xacro:property name="joint_laser2support_x" value="0.0" />
<xacro:property name="joint_laser2support_y" value="0.0" />
<xacro:property name="joint_laser2support_z" value="${support_length / 2 + laser_length / 2}" />
<!-- xacro2urdf -->
<link name="support">
<visual>
<geometry>
<cylinder radius="${support_radius}" length="${support_length}" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
<material name="support_color">
<color rgba="0.5 1.0 0.5 1.0" />
</material>
</visual>
<collision>
<geometry>
<cylinder radius="${support_radius}" length="${support_length}" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
</collision>
<xacro:cylinder_inertial_matrix m="${support_weight}" r="${support_radius}" h="${support_length}" />
</link>
<gazebo reference="support">
<material>Gazebo/Orange</material>
</gazebo>
<joint name="support2base" type="fixed">
<parent link="base_link" />
<child link="support" />
<origin xyz="${joint_support2base_x} ${joint_support2base_y} ${joint_support2base_z}" rpy="0.0 0.0 0.0" />
</joint>
<link name="laser">
<visual>
<geometry>
<cylinder radius="${laser_radius}" length="${laser_length}" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
<material name="laser_color">
<color rgba="0.5 0.5 1.0 1.0" />
</material>
</visual>
<collision>
<geometry>
<cylinder radius="${laser_radius}" length="${laser_length}" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
</collision>
<xacro:cylinder_inertial_matrix m="${laser_weight}" r="${laser_radius}" h="${laser_length}" />
</link>
<gazebo reference="laser">
<material>Gazebo/Red</material>
</gazebo>
<joint name="laser2support" type="fixed">
<parent link="support" />
<child link="laser" />
<origin xyz="${joint_laser2support_x} ${joint_laser2support_y} ${joint_laser2support_z}" rpy="0.0 0.0 0.0" />
</joint>
</robot>
<robot name="camera" xmlns:xacro="http://wiki.ros.org/xacro">
<!-- property -->
<xacro:property name="camera_weight" value="0.01" />
<xacro:property name="camera_length" value="0.02" />
<xacro:property name="camera_width" value="0.05" />
<xacro:property name="camera_height" value="0.05" />
<xacro:property name="joint_camera_x" value="0.08" />
<xacro:property name="joint_camera_y" value="0.0" />
<xacro:property name="joint_camera_z" value="${base_length / 2 + camera_height / 2}" />
<xacro:property name="PI" value="3.1415927" />
<!-- xacro2urdf -->
<link name="camera">
<visual>
<geometry>
<box size="${camera_length} ${camera_width} ${camera_height}" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
<material name="camera_color">
<color rgba="0.5 0.5 0.5 0.5" />
</material>
</visual>
<collision>
<geometry>
<box size="${camera_length} ${camera_width} ${camera_height}" />
</geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
</collision>
<xacro:Box_inertial_matrix m="${camera_weight}" l="${camera_length}" w="${camera_width}" h="${camera_height}" />
</link>
<gazebo reference="camera">
<material>Gazebo/White</material>
</gazebo>
<joint name="camera2base" type="fixed">
<parent link="base_link" />
<child link="camera" />
<origin xyz="${joint_camera_x} ${joint_camera_y} ${joint_camera_z}" rpy="0.0 0.0 0.0" />
</joint>
<link name="camera_deep"></link>
<joint name="camera_deep2camera" type="fixed">
<parent link="camera" />
<child link="camera_deep" />
<origin xyz="0.0 0.0 0.0" rpy="${-PI/2} 0.0 ${-PI/2}" />
</joint>
</robot>
gazebo:环境仿真
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:macro name="gazebo_control_plugin">
<gazebo>
<plugin name='diff_drive' filename='libgazebo_ros_diff_drive.so'>
<ros>
<namespace>/</namespace>
<remapping>cmd_vel:=cmd_vel</remapping>
<remapping>odom:=odom</remapping>
</ros>
<update_rate>30</update_rate>
<!-- wheels -->
<left_joint>left2base</left_joint>
<right_joint>right2base</right_joint>
<!-- kinematics -->
<wheel_separation>0.2</wheel_separation>
<wheel_diameter>0.064</wheel_diameter>
<!-- limits -->
<max_wheel_torque>20</max_wheel_torque>
<max_wheel_acceleration>1.0</max_wheel_acceleration>
<!-- output -->
<publish_odom>true</publish_odom>
<publish_odom_tf>true</publish_odom_tf>
<publish_wheel_tf>true</publish_wheel_tf>
<odometry_frame>odom</odometry_frame>
<robot_base_frame>base_footprint</robot_base_frame>
</plugin>
</gazebo>
</xacro:macro>
</robot>
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:macro name="gazebo_laser_plugin">
<gazebo reference="laser">
<sensor name="laserscan" type="ray">
<plugin name="laserscan" filename="libgazebo_ros_ray_sensor.so">
<ros>
<namespace>/</namespace>
<remapping>~/out:=scan</remapping>
</ros>
<output_type>sensor_msgs/LaserScan</output_type>
<frame_name>laser</frame_name>
</plugin>
<always_on>true</always_on>
<visualize>true</visualize>
<update_rate>5</update_rate>
<pose>0 0 0 0 0 0</pose>
<!-- 激光传感器配置 -->
<ray>
<!-- 设置扫描范围 -->
<scan>
<horizontal>
<samples>360</samples>
<resolution>1.000000</resolution>
<min_angle>0.000000</min_angle>
<max_angle>6.280000</max_angle>
</horizontal>
</scan>
<!-- 设置扫描距离 -->
<range>
<min>0.120000</min>
<max>8.0</max>
<resolution>0.015000</resolution>
</range>
<!-- 设置噪声 -->
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.01</stddev>
</noise>
</ray>
</sensor>
</gazebo>
</xacro:macro>
</robot>
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:macro name="gazebo_imu_plugin">
<gazebo reference="support">
<sensor name="imu_sensor" type="imu">
<plugin name="imu_plugin" filename="libgazebo_ros_imu_sensor.so">
<ros>
<namespace>/</namespace>
<remapping>~/out:=imu</remapping>
</ros>
<initial_orientation_as_reference>false</initial_orientation_as_reference>
</plugin>
<update_rate>100</update_rate>
<always_on>true</always_on>
<!-- 六轴噪声设置 -->
<imu>
<angular_velocity>
<x>
<noise type="gaussian">
<mean>0.0</mean>
<stddev>2e-4</stddev>
<bias_mean>0.0000075</bias_mean>
<bias_stddev>0.0000008</bias_stddev>
</noise>
</x>
<y>
<noise type="gaussian">
<mean>0.0</mean>
<stddev>2e-4</stddev>
<bias_mean>0.0000075</bias_mean>
<bias_stddev>0.0000008</bias_stddev>
</noise>
</y>
<z>
<noise type="gaussian">
<mean>0.0</mean>
<stddev>2e-4</stddev>
<bias_mean>0.0000075</bias_mean>
<bias_stddev>0.0000008</bias_stddev>
</noise>
</z>
</angular_velocity>
<linear_acceleration>
<x>
<noise type="gaussian">
<mean>0.0</mean>
<stddev>1.7e-2</stddev>
<bias_mean>0.1</bias_mean>
<bias_stddev>0.001</bias_stddev>
</noise>
</x>
<y>
<noise type="gaussian">
<mean>0.0</mean>
<stddev>1.7e-2</stddev>
<bias_mean>0.1</bias_mean>
<bias_stddev>0.001</bias_stddev>
</noise>
</y>
<z>
<noise type="gaussian">
<mean>0.0</mean>
<stddev>1.7e-2</stddev>
<bias_mean>0.1</bias_mean>
<bias_stddev>0.001</bias_stddev>
</noise>
</z>
</linear_acceleration>
</imu>
</sensor>
</gazebo>
</xacro:macro>
</robot>
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:macro name="gazebo_camera_plugin">
<gazebo reference="camera">
<sensor type="depth" name="camera_sensor">
<plugin name="depth_camera" filename="libgazebo_ros_camera.so">
<frame_name>camera_deep</frame_name>
</plugin>
<always_on>true</always_on>
<update_rate>10</update_rate>
<camera name="camera">
<horizontal_fov>1.5009831567</horizontal_fov>
<image>
<width>800</width>
<height>600</height>
<format>R8G8B8</format>
</image>
<distortion>
<k1>0.0</k1>
<k2>0.0</k2>
<k3>0.0</k3>
<p1>0.0</p1>
<p2>0.0</p2>
<center>0.5 0.5</center>
</distortion>
</camera>
</sensor>
</gazebo>
</xacro:macro>
</robot>
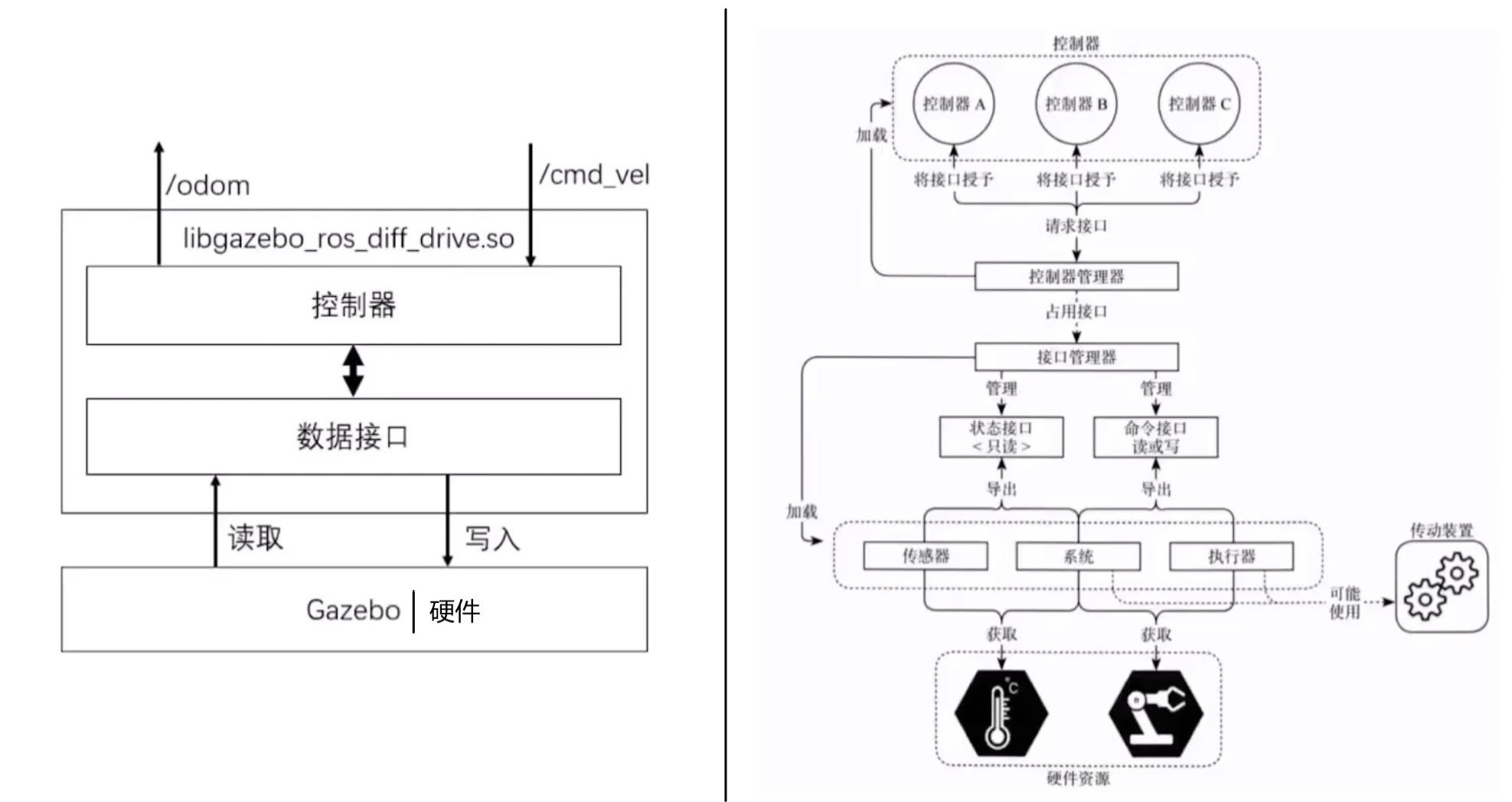
ros2_control
一个数据接口和控制器算法框架,用于硬件集成—实体机器人的控制器与机器人tf的配置。与上面的gazebo插件具有类似的作用,只是数据接口做了统一
框架下常用的控制器管理命令:
# 框架下所有的控制器
ros2 control list_controller_types
# 框架下正在运行的数据接口
ros2 control list_hardware_interfaces
# 框架下正在运行的硬件组件
ros2 control list_hardware_components
# 加载控制器
ros2 control load_cntroller [cntroller_name] --set-state active
# 框架下已加载的控制器
ros2 control list_controllers
# 设置已加载的控制器状态
ros2 control set_controller_state [cntroller_name] inactive|active
# 卸载控制器
ros2 control unload_controller [cntroller_name]
gazebo_ros2_control,提供符合控制器数据接口的数据:
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:macro name="robot_ros2_control">
<ros2_control name="RobotGazeboSystem" type="system">
<hardware>
<plugin>gazebo_ros2_control/GazeboSystem</plugin>
</hardware>
<joint name="left2base">
<command_interface name="velocity">
<param name="min">-1</param>
<param name="max">1</param>
</command_interface>
<command_interface name="effort">
<param name="min">-0.1</param>
<param name="max">0.1</param>
</command_interface>
<state_interface name="position" />
<state_interface name="velocity" />
<state_interface name="effort" />
</joint>
<joint name="right2base">
<command_interface name="velocity">
<param name="min">-1</param>
<param name="max">1</param>
</command_interface>
<command_interface name="effort">
<param name="min">-0.1</param>
<param name="max">0.1</param>
</command_interface>
<state_interface name="position" />
<state_interface name="velocity" />
<state_interface name="effort" />
</joint>
</ros2_control>
<gazebo>
<plugin filename="libgazebo_ros2_control.so" name="gazebo_ros2_control">
<parameters>$(find urdfDemo)/config/robot_ros2_controller.yaml</parameters>
<ros>
<remapping>/robot_diff_drive_controller/cmd_vel_unstamped:=/cmd_vel</remapping>
<remapping>/robot_diff_drive_controller/odom:=/odom</remapping>
</ros>
</plugin>
</gazebo>
</xacro:macro>
</robot>
ros2_control要求启动的控制器:
controller_manager:
ros__parameters:
update_rate: 100 # Hz
use_sim_time: true
robot_joint_state_broadcaster:
type: joint_state_broadcaster/JointStateBroadcaster
robot_effort_controller:
type: effort_controllers/JointGroupEffortController
robot_diff_drive_controller:
type: diff_drive_controller/DiffDriveController
robot_effort_controller:
ros__parameters:
joints:
- left2base
- right2base
command_interfaces:
- effort
state_interfaces:
- position
- velocity
- effort
robot_diff_drive_controller:
ros__parameters:
left_wheel_names: ["left2base"]
right_wheel_names: ["right2base"]
wheel_separation: 0.20
#wheels_per_side: 1 # actually 2, but both are controlled by 1 signal
wheel_radius: 0.032
wheel_separation_multiplier: 1.0
left_wheel_radius_multiplier: 1.0
right_wheel_radius_multiplier: 1.0
publish_rate: 50.0
odom_frame_id: odom
base_frame_id: base_footprint
pose_covariance_diagonal : [0.001, 0.001, 0.0, 0.0, 0.0, 0.01]
twist_covariance_diagonal: [0.001, 0.0, 0.0, 0.0, 0.0, 0.01]
open_loop: true
enable_odom_tf: true
cmd_vel_timeout: 0.5
#publish_limited_velocity: true
use_stamped_vel: false
#velocity_rolling_window_size: 10
如何根据机器人结构关系和传感器信息来控制机器人完成任务,包括SLAM和Navigation
SLAM
即时定位与地图构建,使机器人在未知环境中通过传感器(如激光雷达、摄像头、IMU、超声波传感器和GPS),进行数据采集、特征提取、数据关联、位置估计和地图更新,从而确定自身位置并构建环境地图—map.yaml,yaml内容如下:
| 单位为m | |
|---|---|
| image | 图像名称 |
| mode | 图像模式,trinary(三进制)/scale(缩放的)/raw(原本的值) |
| resolution | 分辨率,一个栅格对应的物理尺寸 |
| origin | 机器人原点坐标系下地图原点位置 |
| negate | 是否反转图像 |
| cooupied_thresh | 占据阈值 |
| free_thresh | 空闲阈值 |
slam-toolbox
# 启动机器人仿真
ros2 launch slam_toolbox online_async_launch.py use_sim_time:=true # 建图
ros2 run teleop_twist_keyboard teleop_twist_keyboard # 控制运动
ros2 run nav2_map_server map_saver_cli -f ./maps/map # 保存地图
cartographer
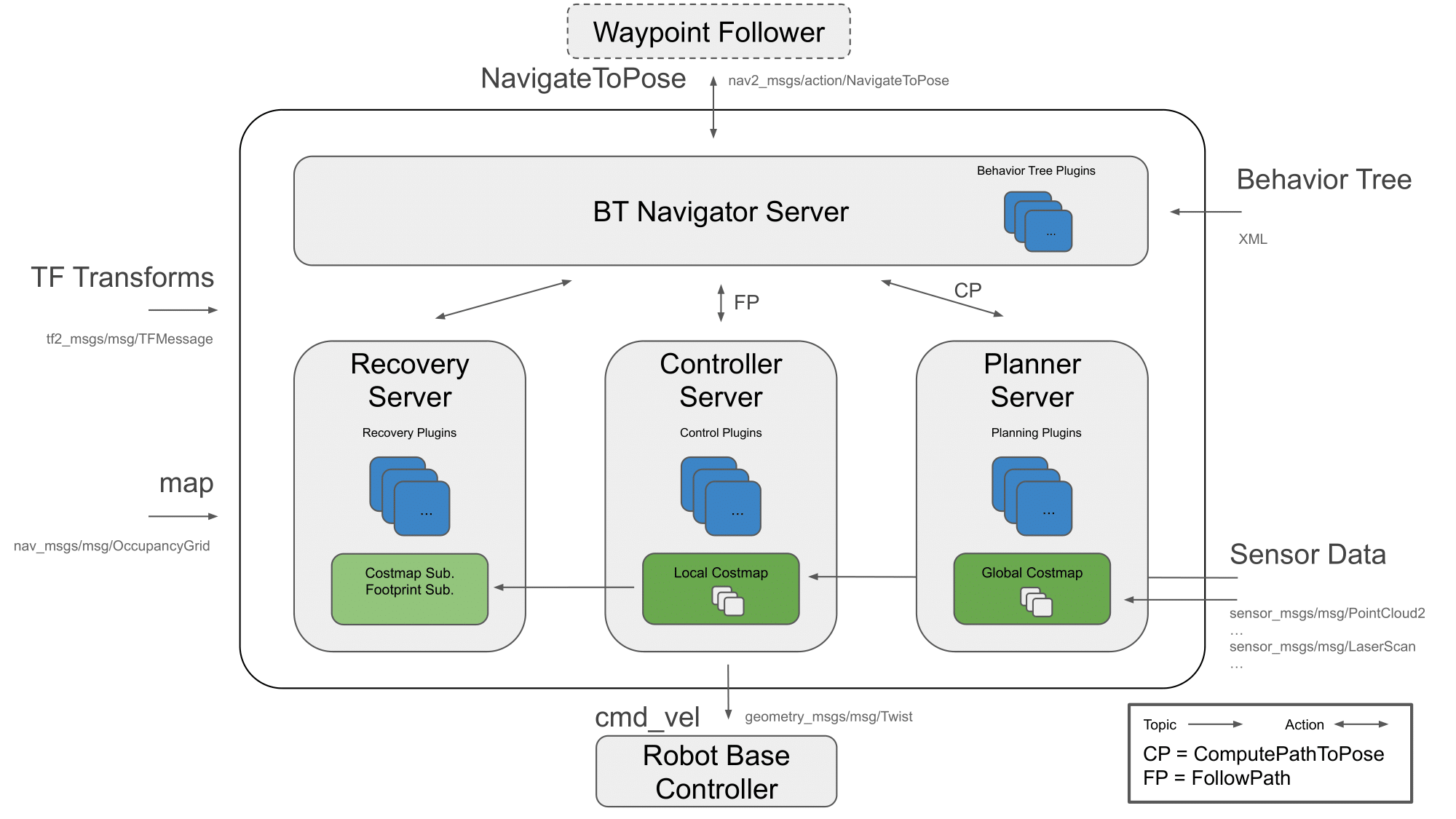
Navigation
导航框架,基于SLAM、目标点、激光雷达和摄像头,提供路径规划、路径跟踪、障碍物避让和恢复行为等功能,使机器人能够在复杂环境中根据目标点/路点/障碍物实现自主导航
Navagation 2:一个launch示例nav2_bringup
一份nav2_bringup/bring_up.launch.py示例如下:
# 启动机器人仿真
from launch import LaunchDescription
from launch_ros.actions import Node
import os
from ament_index_python.packages import get_package_share_directory
from launch.substitutions import LaunchConfiguration
from launch.actions import DeclareLaunchArgument,IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
def generate_launch_description():
default_package_dir = get_package_share_directory('[package_name]')
nav2_bringup_dir = get_package_share_directory('nav2_bringup')
default_rviz_path = os.path.join(nav2_bringup_dir,'rviz','nav2_default_view.rviz')
use_sim_time = LaunchConfiguration('use_sim_time', default='true')
map_yaml_path = LaunchConfiguration('map', default=os.path.join(default_package_dir, 'maps', 'map.yaml'))
nav2_param_path = LaunchConfiguration('params_file',
default=os.path.join(default_package_dir, 'config', '[nav2_params].yaml'))
return LaunchDescription([
DeclareLaunchArgument('use_sim_time', default_value=use_sim_time,
description='Use simulation (Gazebo) clock if true'),
DeclareLaunchArgument('map', default_value=map_yaml_path,
description='Full path to map file to load'),
DeclareLaunchArgument('params_file', default_value=nav2_param_path,
description='Full path to param file to load'),
IncludeLaunchDescription(
PythonLaunchDescriptionSource(
[nav2_bringup_dir, '/launch', '/bringup_launch.py']),
launch_arguments={
'use_sim_time': use_sim_time,
'map': map_yaml_path,
'params_file': nav2_param_path}.items(),
),
Node(
package='rviz2',
executable='rviz2',
arguments=['-d', default_rviz_path],
parameters=[{'use_sim_time': use_sim_time}],
output='screen'
),
])
cp /opt/ros/humble/share/nav2_bringup/params/nav2_params.yaml src/robot_navigation/config/
# 关注topic、frame、robot_radius、controller_server:FollowPath、costmap:inflation_radius、xy_goal_tolerance
amcl:
ros__parameters:
use_sim_time: True
alpha1: 0.2
alpha2: 0.2
alpha3: 0.2
alpha4: 0.2
alpha5: 0.2
base_frame_id: "base_footprint"
beam_skip_distance: 0.5
beam_skip_error_threshold: 0.9
beam_skip_threshold: 0.3
do_beamskip: false
global_frame_id: "map"
lambda_short: 0.1
laser_likelihood_max_dist: 2.0
laser_max_range: 100.0
laser_min_range: -1.0
laser_model_type: "likelihood_field"
max_beams: 60
max_particles: 2000
min_particles: 500
odom_frame_id: "odom"
pf_err: 0.05
pf_z: 0.99
recovery_alpha_fast: 0.0
recovery_alpha_slow: 0.0
resample_interval: 1
robot_model_type: "nav2_amcl::DifferentialMotionModel"
save_pose_rate: 0.5
sigma_hit: 0.2
tf_broadcast: true
transform_tolerance: 1.0
update_min_a: 0.2
update_min_d: 0.25
z_hit: 0.5
z_max: 0.05
z_rand: 0.5
z_short: 0.05
scan_topic: scan
bt_navigator:
ros__parameters:
use_sim_time: True
global_frame: map
robot_base_frame: base_link
odom_topic: /odom
bt_loop_duration: 10
default_server_timeout: 20
wait_for_service_timeout: 1000
# 'default_nav_through_poses_bt_xml' and 'default_nav_to_pose_bt_xml' are use defaults:
# nav2_bt_navigator/navigate_to_pose_w_replanning_and_recovery.xml
# nav2_bt_navigator/navigate_through_poses_w_replanning_and_recovery.xml
# They can be set here or via a RewrittenYaml remap from a parent launch file to Nav2.
plugin_lib_names:
- nav2_compute_path_to_pose_action_bt_node
- nav2_compute_path_through_poses_action_bt_node
- nav2_smooth_path_action_bt_node
- nav2_follow_path_action_bt_node
- nav2_spin_action_bt_node
- nav2_wait_action_bt_node
- nav2_assisted_teleop_action_bt_node
- nav2_back_up_action_bt_node
- nav2_drive_on_heading_bt_node
- nav2_clear_costmap_service_bt_node
- nav2_is_stuck_condition_bt_node
- nav2_goal_reached_condition_bt_node
- nav2_goal_updated_condition_bt_node
- nav2_globally_updated_goal_condition_bt_node
- nav2_is_path_valid_condition_bt_node
- nav2_initial_pose_received_condition_bt_node
- nav2_reinitialize_global_localization_service_bt_node
- nav2_rate_controller_bt_node
- nav2_distance_controller_bt_node
- nav2_speed_controller_bt_node
- nav2_truncate_path_action_bt_node
- nav2_truncate_path_local_action_bt_node
- nav2_goal_updater_node_bt_node
- nav2_recovery_node_bt_node
- nav2_pipeline_sequence_bt_node
- nav2_round_robin_node_bt_node
- nav2_transform_available_condition_bt_node
- nav2_time_expired_condition_bt_node
- nav2_path_expiring_timer_condition
- nav2_distance_traveled_condition_bt_node
- nav2_single_trigger_bt_node
- nav2_goal_updated_controller_bt_node
- nav2_is_battery_low_condition_bt_node
- nav2_navigate_through_poses_action_bt_node
- nav2_navigate_to_pose_action_bt_node
- nav2_remove_passed_goals_action_bt_node
- nav2_planner_selector_bt_node
- nav2_controller_selector_bt_node
- nav2_goal_checker_selector_bt_node
- nav2_controller_cancel_bt_node
- nav2_path_longer_on_approach_bt_node
- nav2_wait_cancel_bt_node
- nav2_spin_cancel_bt_node
- nav2_back_up_cancel_bt_node
- nav2_assisted_teleop_cancel_bt_node
- nav2_drive_on_heading_cancel_bt_node
- nav2_is_battery_charging_condition_bt_node
bt_navigator_navigate_through_poses_rclcpp_node:
ros__parameters:
use_sim_time: True
bt_navigator_navigate_to_pose_rclcpp_node:
ros__parameters:
use_sim_time: True
controller_server:
ros__parameters:
use_sim_time: True
controller_frequency: 20.0
min_x_velocity_threshold: 0.001
min_y_velocity_threshold: 0.5
min_theta_velocity_threshold: 0.001
failure_tolerance: 0.3
progress_checker_plugin: "progress_checker"
goal_checker_plugins: ["general_goal_checker"] # "precise_goal_checker"
controller_plugins: ["FollowPath"]
# Progress checker parameters
progress_checker:
plugin: "nav2_controller::SimpleProgressChecker"
required_movement_radius: 0.5
movement_time_allowance: 10.0
# Goal checker parameters
#precise_goal_checker:
# plugin: "nav2_controller::SimpleGoalChecker"
# xy_goal_tolerance: 0.25
# yaw_goal_tolerance: 0.25
# stateful: True
general_goal_checker:
stateful: True
plugin: "nav2_controller::SimpleGoalChecker"
xy_goal_tolerance: 0.25
yaw_goal_tolerance: 0.25
# DWB parameters
FollowPath:
plugin: "dwb_core::DWBLocalPlanner"
debug_trajectory_details: True
min_vel_x: 0.0
min_vel_y: 0.0
max_vel_x: 0.26
max_vel_y: 0.0
max_vel_theta: 1.0
min_speed_xy: 0.0
max_speed_xy: 0.26
min_speed_theta: 0.0
# Add high threshold velocity for turtlebot 3 issue.
# https://github.com/ROBOTIS-GIT/turtlebot3_simulations/issues/75
acc_lim_x: 2.5
acc_lim_y: 0.0
acc_lim_theta: 3.2
decel_lim_x: -2.5
decel_lim_y: 0.0
decel_lim_theta: -3.2
vx_samples: 20
vy_samples: 5
vtheta_samples: 20
sim_time: 1.7
linear_granularity: 0.05
angular_granularity: 0.025
transform_tolerance: 0.2
xy_goal_tolerance: 0.25
trans_stopped_velocity: 0.25
short_circuit_trajectory_evaluation: True
stateful: True
critics: ["RotateToGoal", "Oscillation", "BaseObstacle", "GoalAlign", "PathAlign", "PathDist", "GoalDist"]
BaseObstacle.scale: 0.02
PathAlign.scale: 32.0
PathAlign.forward_point_distance: 0.1
GoalAlign.scale: 24.0
GoalAlign.forward_point_distance: 0.1
PathDist.scale: 32.0
GoalDist.scale: 24.0
RotateToGoal.scale: 32.0
RotateToGoal.slowing_factor: 5.0
RotateToGoal.lookahead_time: -1.0
local_costmap:
local_costmap:
ros__parameters:
update_frequency: 5.0
publish_frequency: 2.0
global_frame: odom
robot_base_frame: base_link
use_sim_time: True
rolling_window: true
width: 3
height: 3
resolution: 0.05
robot_radius: 0.12
plugins: ["voxel_layer", "inflation_layer"]
inflation_layer:
plugin: "nav2_costmap_2d::InflationLayer"
cost_scaling_factor: 3.0
inflation_radius: 0.55
voxel_layer:
plugin: "nav2_costmap_2d::VoxelLayer"
enabled: True
publish_voxel_map: True
origin_z: 0.0
z_resolution: 0.05
z_voxels: 16
max_obstacle_height: 2.0
mark_threshold: 0
observation_sources: scan
scan:
topic: /scan
max_obstacle_height: 2.0
clearing: True
marking: True
data_type: "LaserScan"
raytrace_max_range: 3.0
raytrace_min_range: 0.0
obstacle_max_range: 2.5
obstacle_min_range: 0.0
static_layer:
plugin: "nav2_costmap_2d::StaticLayer"
map_subscribe_transient_local: True
always_send_full_costmap: True
global_costmap:
global_costmap:
ros__parameters:
update_frequency: 1.0
publish_frequency: 1.0
global_frame: map
robot_base_frame: base_link
use_sim_time: True
robot_radius: 0.12
resolution: 0.05
track_unknown_space: true
plugins: ["static_layer", "obstacle_layer", "inflation_layer"]
obstacle_layer:
plugin: "nav2_costmap_2d::ObstacleLayer"
enabled: True
observation_sources: scan
scan:
topic: /scan
max_obstacle_height: 2.0
clearing: True
marking: True
data_type: "LaserScan"
raytrace_max_range: 3.0
raytrace_min_range: 0.0
obstacle_max_range: 2.5
obstacle_min_range: 0.0
static_layer:
plugin: "nav2_costmap_2d::StaticLayer"
map_subscribe_transient_local: True
inflation_layer:
plugin: "nav2_costmap_2d::InflationLayer"
cost_scaling_factor: 3.0
inflation_radius: 0.55
always_send_full_costmap: True
map_server:
ros__parameters:
use_sim_time: True
# Overridden in launch by the "map" launch configuration or provided default value.
# To use in yaml, remove the default "map" value in the tb3_simulation_launch.py file & provide full path to map below.
yaml_filename: ""
map_saver:
ros__parameters:
use_sim_time: True
save_map_timeout: 5.0
free_thresh_default: 0.25
occupied_thresh_default: 0.65
map_subscribe_transient_local: True
planner_server:
ros__parameters:
expected_planner_frequency: 20.0
use_sim_time: True
planner_plugins: ["GridBased"]
GridBased:
plugin: "nav2_navfn_planner/NavfnPlanner"
tolerance: 0.5
use_astar: false
allow_unknown: true
smoother_server:
ros__parameters:
use_sim_time: True
smoother_plugins: ["simple_smoother"]
simple_smoother:
plugin: "nav2_smoother::SimpleSmoother"
tolerance: 1.0e-10
max_its: 1000
do_refinement: True
behavior_server:
ros__parameters:
costmap_topic: local_costmap/costmap_raw
footprint_topic: local_costmap/published_footprint
cycle_frequency: 10.0
behavior_plugins: ["spin", "backup", "drive_on_heading", "assisted_teleop", "wait"]
spin:
plugin: "nav2_behaviors/Spin"
backup:
plugin: "nav2_behaviors/BackUp"
drive_on_heading:
plugin: "nav2_behaviors/DriveOnHeading"
wait:
plugin: "nav2_behaviors/Wait"
assisted_teleop:
plugin: "nav2_behaviors/AssistedTeleop"
global_frame: odom
robot_base_frame: base_link
transform_tolerance: 0.1
use_sim_time: true
simulate_ahead_time: 2.0
max_rotational_vel: 1.0
min_rotational_vel: 0.4
rotational_acc_lim: 3.2
robot_state_publisher:
ros__parameters:
use_sim_time: True
waypoint_follower:
ros__parameters:
use_sim_time: True
loop_rate: 20
stop_on_failure: false
waypoint_task_executor_plugin: "wait_at_waypoint"
wait_at_waypoint:
plugin: "nav2_waypoint_follower::WaitAtWaypoint"
enabled: True
waypoint_pause_duration: 200
velocity_smoother:
ros__parameters:
use_sim_time: True
smoothing_frequency: 20.0
scale_velocities: False
feedback: "OPEN_LOOP"
max_velocity: [0.26, 0.0, 1.0]
min_velocity: [-0.26, 0.0, -1.0]
max_accel: [2.5, 0.0, 3.2]
max_decel: [-2.5, 0.0, -3.2]
odom_topic: "odom"
odom_duration: 0.1
deadband_velocity: [0.0, 0.0, 0.0]
velocity_timeout: 1.0
初始化位姿,nav2 包中amcl需要初始位姿估计才能运行,否则无法发布tf【map -> odom】
ros2 topic pub /initialpose geometry_msgs/msg/PoseWithCovarianceStamped "{header: {frame_id: map}}" --once
from geometry_msgs.msg import PoseStamped
from nav2_simple_commander.robot_navigator import BasicNavigator
import rclpy
def main():
rclpy.init()
nav = BasicNavigator()
init_pose = PoseStamped()
init_pose.header.frame_id = 'map'
init_pose.header.stamp = nav.get_clock().now().to_msg()
init_pose.pose.position.x = 0.0
init_pose.pose.position.y = 0.0
init_pose.pose.position.z = 0.0
init_pose.pose.orientation.w = 1.0
nav.setInitialPose(init_pose)
nav.waitUntilNav2Active()
rclpy.spin(nav)
rclpy.shutdown()
if __name__ == '__main__':
main()
使用tf获取机器人实时位姿
import rclpy
from rclpy.node import Node
from tf2_ros.buffer import Buffer
from tf2_ros.transform_listener import TransformListener
from rclpy.time import Time
class TFListener(Node):
def __init__(self):
super().__init__("tf_listener")
self.buffer = Buffer()
self.listener = TransformListener(self.buffer,self)
self.timer = self.create_timer(1.0,self.on_timer)
def on_timer(self):
if self.buffer.can_transform("map","base_footprint",Time()):
ts = self.buffer.lookup_transform("map","base_footprint",Time())
self.get_logger().info(
"转换的结果,父坐标系:%s,子坐标系:%s,偏移量:(%.2f,%.2f,%.2f)"
% (ts.header.frame_id,ts.child_frame_id,
ts.transform.translation.x,
ts.transform.translation.y,
ts.transform.translation.z)
)
else:
self.get_logger().info("转换失败......")
def main():
rclpy.init()
rclpy.spin(TFListener())
rclpy.shutdown()
if __name__ == '__main__':
main()
动作通信发布目标点
ros2 action send_goal /navigate_to_pose nav2_msgs/action/NavigateToPose "{pose: {header: {frame_id: map}, pose: {position: {x: 2.0, y: 1.0}}}}" --feedback
from geometry_msgs.msg import PoseStamped
from nav2_simple_commander.robot_navigator import BasicNavigator
import rclpy
def main():
rclpy.init()
nav = BasicNavigator()
nav.waitUntilNav2Active()
to_pose = PoseStamped()
to_pose.header.frame_id = 'map'
to_pose.header.stamp = nav.get_clock().now().to_msg()
to_pose.pose.position.x = 2.0
to_pose.pose.position.y = 1.0
to_pose.pose.position.z = 0.0
to_pose.pose.orientation.w = 1.0
nav.goToPose(to_pose)
while not nav.isTaskComplete():
feedback = nav.getFeedback()
nav.get_logger().info(f'distance remain: {feedback.distance_remaining}')
# nav.cancelTask()
result = nav.getResult()
nav.get_logger().info(f'nav2 result: {result}')
rclpy.spin(nav)
rclpy.shutdown()
if __name__ == '__main__':
main()
动作通信发布多目标点
# ...
from geometry_msgs.msg import PoseStamped
from nav2_simple_commander.robot_navigator import BasicNavigator
import rclpy
def main():
rclpy.init()
nav = BasicNavigator()
nav.waitUntilNav2Active()
to_poses = [ ]
to_pose = PoseStamped()
to_pose.header.frame_id = 'map'
to_pose.header.stamp = nav.get_clock().now().to_msg()
to_pose.pose.position.x = 2.0
to_pose.pose.position.y = 1.0
to_pose.pose.position.z = 0.0
to_pose.pose.orientation.w = 1.0
to_poses.append(to_pose)
to_pose1 = PoseStamped()
to_pose1.header.frame_id = 'map'
to_pose1.header.stamp = nav.get_clock().now().to_msg()
to_pose1.pose.position.x = 2.0
to_pose1.pose.position.y = 1.5
to_pose1.pose.position.z = 0.0
to_pose1.pose.orientation.w = 1.0
to_poses.append(to_pose1)
nav.followWaypoints(to_poses)
while not nav.isTaskComplete():
feedback = nav.getFeedback()
nav.get_logger().info(f'current waypoint: {feedback.current_waypoint}')
# nav.cancelTask()
result = nav.getResult()
nav.get_logger().info(f'nav2 result: {result}')
rclpy.spin(nav)
rclpy.shutdown()
if __name__ == '__main__':
main()
Demo
yaml多点导航
import rclpy
from geometry_msgs.msg import PoseStamped, Pose
from nav2_simple_commander.robot_navigator import BasicNavigator, TaskResult
from tf2_ros import TransformListener, Buffer
from tf_transformations import euler_from_quaternion, quaternion_from_euler
from rclpy.duration import Duration
# 添加服务接口
from autopatrol_interfaces.srv import SpeachText
from sensor_msgs.msg import Image
from cv_bridge import CvBridge
import cv2
class PatrolNode(BasicNavigator):
def __init__(self, node_name='patrol_node'):
super().__init__(node_name)
# 导航相关定义
self.declare_parameter('initial_point', [0.0, 0.0, 0.0])
self.declare_parameter('target_points', [0.0, 0.0, 0.0, 1.0, 1.0, 1.57])
self.initial_point_ = self.get_parameter('initial_point').value
self.target_points_ = self.get_parameter('target_points').value
# 实时位置获取 TF 相关定义
self.buffer_ = Buffer()
self.listener_ = TransformListener(self.buffer_, self)
self.speach_client_ = self.create_client(SpeachText, 'speech_text')
# 订阅与保存图像相关定义
self.declare_parameter('image_save_path', '')
self.image_save_path = self.get_parameter('image_save_path').value
self.bridge = CvBridge()
self.latest_image = None
self.subscription_image = self.create_subscription(
Image, '/camera_sensor/image_raw', self.image_callback, 10)
def image_callback(self, msg):
"""
将最新的消息放到 latest_image 中
"""
self.latest_image = msg
def record_image(self):
"""
记录图像
"""
if self.latest_image is not None:
pose = self.get_current_pose()
cv_image = self.bridge.imgmsg_to_cv2(self.latest_image)
cv2.imwrite(f'{self.image_save_path}image_{pose.translation.x:3.2f}_{pose.translation.y:3.2f}.png', cv_image)
def speach_text(self, text):
"""
调用服务播放语音
"""
while not self.speach_client_.wait_for_service(timeout_sec=1.0):
self.get_logger().info('语合成服务未上线,等待中。。。')
request = SpeachText.Request()
request.text = text
future = self.speach_client_.call_async(request)
rclpy.spin_until_future_complete(self, future)
if future.result() is not None:
result = future.result().result
if result:
self.get_logger().info(f'语音合成成功:{text}')
else:
self.get_logger().warn(f'语音合成失败:{text}')
else:
self.get_logger().warn('语音合成服务请求失败')
def get_pose_by_xyyaw(self, x, y, yaw):
"""
通过 x,y,yaw 合成 PoseStamped
"""
pose = PoseStamped()
pose.header.frame_id = 'map'
pose.pose.position.x = x
pose.pose.position.y = y
rotation_quat = quaternion_from_euler(0, 0, yaw)
pose.pose.orientation.x = rotation_quat[0]
pose.pose.orientation.y = rotation_quat[1]
pose.pose.orientation.z = rotation_quat[2]
pose.pose.orientation.w = rotation_quat[3]
return pose
def init_robot_pose(self):
"""
初始化机器人位姿
"""
# 从参数获取初始化点
self.initial_point_ = self.get_parameter('initial_point').value
# 合成位姿并进行初始化
self.setInitialPose(self.get_pose_by_xyyaw(
self.initial_point_[0], self.initial_point_[1], self.initial_point_[2]))
# 等待直到导航激活
self.waitUntilNav2Active()
def get_target_points(self):
"""
通过参数值获取目标点集合
"""
points = []
self.target_points_ = self.get_parameter('target_points').value
for index in range(int(len(self.target_points_)/3)):
x = self.target_points_[index*3]
y = self.target_points_[index*3+1]
yaw = self.target_points_[index*3+2]
points.append([x, y, yaw])
self.get_logger().info(f'获取到目标点: {index}->({x},{y},{yaw})')
return points
def nav_to_pose(self, target_pose):
"""
导航到指定位姿
"""
self.waitUntilNav2Active()
result = self.goToPose(target_pose)
while not self.isTaskComplete():
feedback = self.getFeedback()
if feedback:
self.get_logger().info(f'预计: {Duration.from_msg(feedback.estimated_time_remaining).nanoseconds / 1e9} s 后到达')
# 最终结果判断
result = self.getResult()
if result == TaskResult.SUCCEEDED:
self.get_logger().info('导航结果:成功')
elif result == TaskResult.CANCELED:
self.get_logger().warn('导航结果:被取消')
elif result == TaskResult.FAILED:
self.get_logger().error('导航结果:失败')
else:
self.get_logger().error('导航结果:返回状态无效')
def get_current_pose(self):
"""
通过TF获取当前位姿
"""
while rclpy.ok():
try:
tf = self.buffer_.lookup_transform(
'map', 'base_footprint', rclpy.time.Time(seconds=0), rclpy.time.Duration(seconds=1))
transform = tf.transform
rotation_euler = euler_from_quaternion([
transform.rotation.x,
transform.rotation.y,
transform.rotation.z,
transform.rotation.w
])
self.get_logger().info(
f'平移:{transform.translation},旋转四元数:{transform.rotation}:旋转欧拉角:{rotation_euler}')
return transform
except Exception as e:
self.get_logger().warn(f'不能够获取坐标变换,原因: {str(e)}')
def main():
rclpy.init()
patrol = PatrolNode()
patrol.speach_text(text='正在初始化位置')
patrol.init_robot_pose()
patrol.speach_text(text='位置初始化完成')
while rclpy.ok():
for point in patrol.get_target_points():
x, y, yaw = point[0], point[1], point[2]
# 导航到目标点
target_pose = patrol.get_pose_by_xyyaw(x, y, yaw)
patrol.speach_text(text=f'准备前往目标点{x},{y}')
patrol.nav_to_pose(target_pose)
patrol.speach_text(text=f"已到达目标点{x},{y},准备记录图像")
patrol.record_image()
patrol.speach_text(text=f"图像记录完成")
rclpy.shutdown()
if __name__ == '__main__':
main()
import rclpy
from rclpy.node import Node
from autopatrol_interfaces.srv import SpeachText
import espeakng
class Speaker(Node):
def __init__(self, node_name):
super().__init__(node_name)
self.speech_service = self.create_service(
SpeachText, 'speech_text', self.speak_text_callback)
self.speaker = espeakng.Speaker()
self.speaker.voice = 'zh'
def speak_text_callback(self, request, response):
self.get_logger().info('正在朗读 %s' % request.text)
self.speaker.say(request.text)
self.speaker.wait()
response.result = True
return response
def main(args=None):
rclpy.init(args=args)
node = Speaker('speaker')
rclpy.spin(node)
rclpy.shutdown()